#include <ureactivepath.h>
Collaboration diagram for UReacRoadLine:
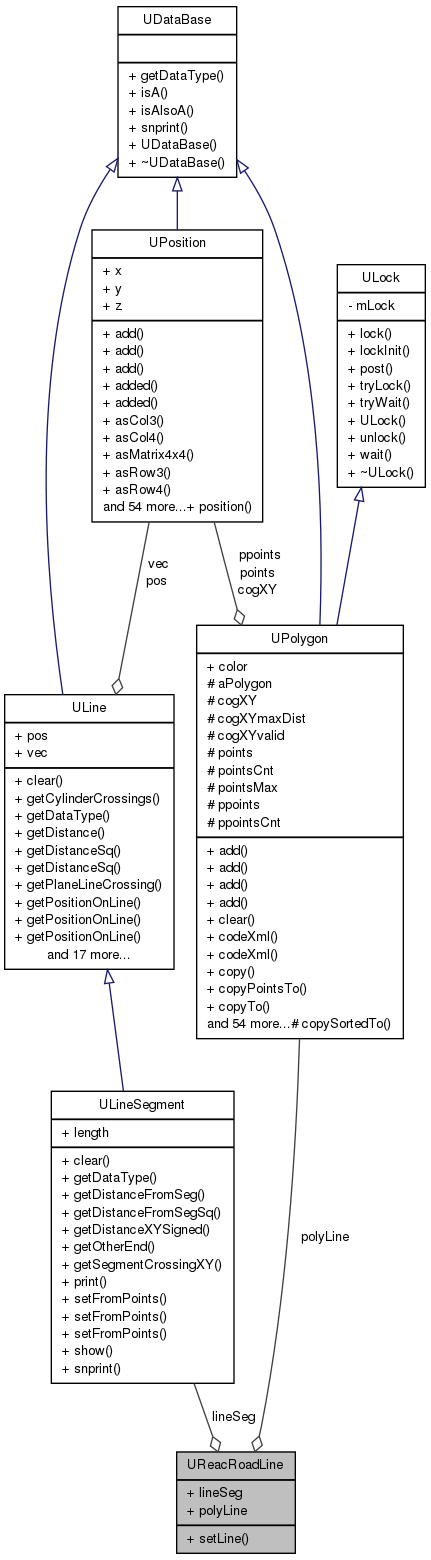
Public Member Functions | |
| void | setLine (ULineSegment *firstSeg, UPolygon *lineHist) |
Public Attributes | |
| ULineSegment * | lineSeg |
| UPolygon * | polyLine |
Detailed Description
Road edge obstacle. This obstacle is a line that must be passed on one side only., that is if the closest point is an end there is no side limitation, if it is not an end, then the path should be assumed to be non-valid.
Member Function Documentation
| void UReacRoadLine::setLine | ( | ULineSegment * | firstSeg, |
| UPolygon * | lineHist | ||
| ) | [inline] |
Set road obstacle
References lineSeg, and polyLine.
Referenced by UReacRoadLines::addLeftLine(), and UReacRoadLines::addRightLine().
Member Data Documentation
Newest Line segment
Referenced by setLine().
Poly-line obstacle
Referenced by setLine().
The documentation for this class was generated from the following file:
