|
AURobotServers
4
|
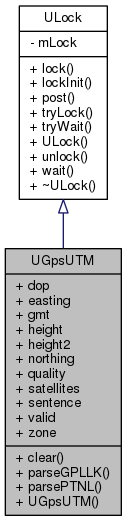
GPS UTM struct to hold the GPS fix information in the Universal Transversal Metacore system. More...
#include <uresgps.h>
Public Member Functions | |
| void | clear () |
| bool | parseGPLLK (char *inBuf) |
| bool | parsePTNL (char *inBuf) |
| UGpsUTM () | |
 Public Member Functions inherited from ULock Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
Public Attributes | |
| double | dop |
| Dillution of Precision for the fix. More... | |
| double | easting |
| Easting coordinate UTM (zone 32) More... | |
| UTime | gmt |
| detect time (UTM) More... | |
| double | height |
| Antenna height data. More... | |
| int | height2 |
| Not used. More... | |
| double | northing |
| Northing coordinate UTM (zone 32) More... | |
| int | quality |
| Show the quality of the fix (No gps/gps/dgps) More... | |
| int | satellites |
| Show the nuber of satellites used in the fix. More... | |
| char | sentence [GPS_SENTENCE_MAX_LENGTH] |
| last message received More... | |
| bool | valid |
| Show if the fix is valid. More... | |
| int | zone |
| projection zone used More... | |
GPS UTM struct to hold the GPS fix information in the Universal Transversal Metacore system.
|
inline |
Constructor
References UGpsStatus::clear().
| void UGpsUTM::clear | ( | void | ) |
Clear the structure
| bool UGpsUTM::parseGPLLK | ( | char * | inBuf | ) |
Parse UTM position using Leika protocold
| bool UGpsUTM::parsePTNL | ( | char * | inBuf | ) |
Parse a RSK-GPS proparity message, where data is converted to UTM
| [in] | string | like $PTNL,PJK,123148.30,091807,+6174357.366,N,+707854.368,E,1,07,3.1,EHT+64.037,M*74 |
References GPS_SENTENCE_MAX_LENGTH, ULock::lock(), UGpsStatus::sentence, and ULock::unlock().
| double UGpsUTM::dop |
Dillution of Precision for the fix.
| double UGpsUTM::easting |
Easting coordinate UTM (zone 32)
| UTime UGpsUTM::gmt |
detect time (UTM)
| double UGpsUTM::height |
Antenna height data.
| int UGpsUTM::height2 |
Not used.
| double UGpsUTM::northing |
Northing coordinate UTM (zone 32)
| int UGpsUTM::quality |
Show the quality of the fix (No gps/gps/dgps)
| int UGpsUTM::satellites |
Show the nuber of satellites used in the fix.
| char UGpsUTM::sentence[GPS_SENTENCE_MAX_LENGTH] |
last message received
| bool UGpsUTM::valid |
Show if the fix is valid.
| int UGpsUTM::zone |
projection zone used
 1.8.11
1.8.11

