|
| void | clear () |
| |
| const char * | getCode () |
| |
| unsigned long | getCodeInt () |
| |
| UTime | getTime () |
| |
| bool | isCrcValid () |
| |
| bool | isPosValid () |
| |
| bool | isValid () |
| |
| void | set (const char *newCode) |
| |
| void | set (UPosition pos, URotation rot) |
| |
| void | setPosValid (bool value) |
| |
| void | setTime (UTime atTime) |
| |
| | UGmk () |
| |
| | ~UGmk () |
| |
| void | clear () |
| |
| UPlane | getCamToRobPlane (UPlane plane) |
| | Convert this plane from camera to robot coordinates. Assumes that this pose is the camera pose relative to the robot. More...
|
| |
| virtual const char * | getDataType () |
| |
| double | getKappa () |
| |
| UMatrix4 | getMtoRMatrix () |
| |
| double | getOmega () |
| |
| double | getPhi () |
| |
| UPosition * | getPos () |
| |
| UPosRot * | getPosRot () |
| |
| UPlane | getRobToCamPlane (UPlane plane) |
| | Convert this plane from robot to camera coordinates. Assumes that this pose is the camera pose relative to the robot. More...
|
| |
| URotation * | getRot () |
| |
| UMatrix4 | getRtoMMatrix () |
| |
| double | getTheta () |
| |
| double | getX () |
| |
| double | getY () |
| |
| double | getZ () |
| |
| UPosition | pos () |
| |
| void | print (const char *prestring) |
| |
| URotation | rot () |
| |
| void | set (UPosition pos, URotation rot) |
| |
| void | set (double x, double y, double z, double Omega, double Phi, double Kappa) |
| |
| void | setCtoR (UPosRot *camera, UPosRot *guidemark, bool mirror) |
| |
| void | setFromPose (double x, double y, double h) |
| |
| void | setKappa (double value) |
| |
| void | setOmega (double value) |
| |
| void | setPhi (double value) |
| |
| void | setPos (UPosition pos) |
| |
| void | setRot (URotation rot) |
| |
| void | setRtoC (UPosRot *camera, UPosRot *guidemark) |
| |
| void | setTheta (double value) |
| |
| void | setX (double value) |
| |
| void | setY (double value) |
| |
| void | setZ (double value) |
| |
| | UPosRot () |
| |
| | ~UPosRot () |
| |
| void | add (const UPosition *pos) |
| |
| void | add (const UPosition pos) |
| |
| void | add (const double ix, const double iy, const double iz) |
| |
| UPosition | added (UPosition *pos) |
| |
| UPosition | added (UPosition pos) |
| |
| UMatrix4 | asCol3 () |
| |
| UMatrix4 | asCol4 () |
| |
| UMatrix4 | asMatrix4x4 () |
| |
| UMatrix4 | asRow3 () |
| |
| UMatrix4 | asRow4 () |
| |
| UMatrix4 | asVector3 (bool column) |
| |
| UMatrix4 | asVector4 (bool column) |
| |
| void | clear (void) |
| |
| virtual const char * | codeXml (char *buf, const int bufCnt, const char *extraAttr) |
| |
| virtual const char * | codeXml (const char *name, char *buf, const int bufCnt, const char *extraAttr) |
| |
| int | copy (UMatrix4 *pos) |
| |
| int | copy (const URotation *rot) |
| |
| UPosition | cross (UPosition p2) |
| |
| void | cross (UPosition p1, UPosition p2) |
| |
| double | dist (const UPosition *pTo) |
| |
| double | dist (UPosition To) |
| |
| double | dist () |
| |
| double | distSq (const UPosition *pTo) |
| |
| double | distSq () |
| |
| double | distXY () |
| |
| double | distXY (UPosition p2) |
| |
| double | dot (UPosition p2) |
| |
| double | get (int idx) |
| |
| UMatrix4 | getPixelPos (UMatrix4 *A, UMatrix4 *b) |
| |
| UPosition * | getPos () |
| |
| UPosition | getTangentPointXY (const UPosition centre, const double radius, const bool rightSide, bool *valid, double *ang=NULL) |
| |
| bool | load (const char *valueString) |
| |
| int | LoadFromReg (Uconfig *ini, const char *subject, const char *key) |
| |
| UPosition | operator* (const double scalar) |
| |
| void | operator*= (const double scalar) |
| |
| UPosition | operator+ (UPosition pos) |
| |
| void | operator+= (const UPosition pos) |
| |
| UPosition | operator- (UPosition pos) |
| |
| void | operator-= (const UPosition pos) |
| |
| UPosition | operator= (UMatrix4 vec) |
| |
| UPosition | operator= (const URotation rot) |
| |
| UPosition | operator= (const U2Dpos val) |
| |
| void | print (const char *leadString) |
| |
| void | println (const char *leadString) |
| |
| bool | save (FILE *fmap, const char *key) |
| |
| int | SaveToReg (Uconfig *ini, const char *subject, const char *key) |
| |
| void | scale (const double val) |
| |
| UPosition | scaled (const double val) |
| |
| void | set (const double ix, const double iy, const double iz) |
| |
| void | set (const int idx, const double value) |
| |
| void | setPos (UPosition fromPos) |
| |
| void | show (const char *leadString) |
| |
| virtual void | snprint (const char *leadString, char *s, const int bufferLength) |
| |
| void | sprint (char *s, const char *leadString) |
| |
| void | subtract (const UPosition *pos) |
| |
| UPosition | subtracted (UPosition *pos) |
| |
| UPosition | subtracted (UPosition pos) |
| |
| int | toUnitVector () |
| |
| void | transfer (UMatrix4 *mA) |
| |
| UPosition | transferred (UMatrix4 *mA) |
| |
| | UPosition () |
| |
| | UPosition (double ix, double iy, double iz) |
| |
| | UPosition (double ix, double iy) |
| |
| virtual | ~UPosition () |
| |
| bool | isA (const char *typeString) |
| |
| virtual bool | isAlsoA (const char *typeString) |
| |
| | UDataBase () |
| |
| virtual | ~UDataBase () |
| |
| void | add (URotation *rot) |
| |
| void | add (URotation rot) |
| |
| void | add (double iOmega, double iPhi, double iKappa) |
| |
| URotation | added (URotation *rot) |
| |
| UMatrix4 | asMatrix3x3CtoW () |
| |
| UMatrix4 | asMatrix3x3K () |
| |
| UMatrix4 | asMatrix3x3Kt () |
| |
| UMatrix4 | asMatrix3x3MtoR () |
| |
| UMatrix4 | asMatrix3x3O () |
| |
| UMatrix4 | asMatrix3x3Ot () |
| |
| UMatrix4 | asMatrix3x3P () |
| |
| UMatrix4 | asMatrix3x3Pt () |
| |
| UMatrix4 | asMatrix3x3RtoM () |
| |
| UMatrix4 | asMatrix3x3WtoC () |
| |
| UMatrix4 | asMatrix4x4CtoW () |
| |
| UMatrix4 | asMatrix4x4CtoW (UPosition *pos) |
| |
| UMatrix4 | asMatrix4x4MtoR () |
| |
| UMatrix4 | asMatrix4x4MtoR (UPosition *pos) |
| |
| UMatrix4 | asMatrix4x4MtoR (UPosition pos) |
| |
| UMatrix4 | asMatrix4x4RtoM () |
| |
| UMatrix4 | asMatrix4x4RtoM (UPosition *pos) |
| |
| UMatrix4 | asMatrix4x4RtoM (UPosition pos) |
| |
| UMatrix4 | asMatrix4x4WtoC () |
| |
| UMatrix4 | asMatrix4x4WtoC (UPosition *pos) |
| |
| UMatrix4 | asUnitZVector3CtoW () |
| |
| UMatrix4 | asUnitZVector4CtoW () |
| |
| UMatrix4 | asVector3 () |
| |
| UMatrix4 | asVector4 () |
| |
| void | clear (void) |
| |
| virtual const char * | codeXml (char *buff, const int buffCnt, const char *extra) |
| |
| virtual const char * | codeXml (const char *name, char *buff, const int buffCnt, const char *extra) |
| |
| int | copy (UMatrix4 *rot) |
| |
| int | copy (UPosition *pos) |
| |
| URotation * | getRot () |
| |
| void | LimitToPi () |
| |
| void | limitToPi () |
| |
| bool | load (const char *valueString) |
| |
| int | LoadFromReg (Uconfig *ini, const char *subject, const char *key) |
| |
| URotation | operator* (double val) |
| |
| void | operator*= (double val) |
| |
| URotation | operator+ (URotation rot) |
| |
| void | operator+= (URotation rot) |
| |
| URotation | operator- (URotation rot) |
| |
| void | operator-= (URotation rot) |
| |
| URotation | operator= (UMatrix4 vec) |
| |
| URotation | operator= (UPosition pos) |
| |
| void | print (const char *leadString) |
| |
| bool | save (FILE *fmap, const char *key) |
| |
| int | SaveToReg (Uconfig *ini, const char *subject, const char *key) |
| |
| void | scale (double val) |
| |
| URotation | scaled (double val) |
| |
| void | set (double iOmega, double iPhi, double iKappa) |
| |
| void | setFromYZ (UPosition posY, UPosition posZ) |
| |
| void | setRot (URotation rot) |
| |
| void | show (const char *leadString) |
| |
| void | snprint (const char *leadString, bool inDegree, char *s, const int bufferLength) |
| |
| void | sprint (char *s, const char *leadString, bool inDegree=true) |
| |
| void | subtract (URotation *rot) |
| |
| URotation | subtracted (URotation *rot) |
| |
| | URotation () |
| |
| | URotation (double iOmega, double iPhi, double iKappa) |
| |
| virtual | ~URotation () |
| |
Holds information of a guidemark
- Author
- Christian Andersen
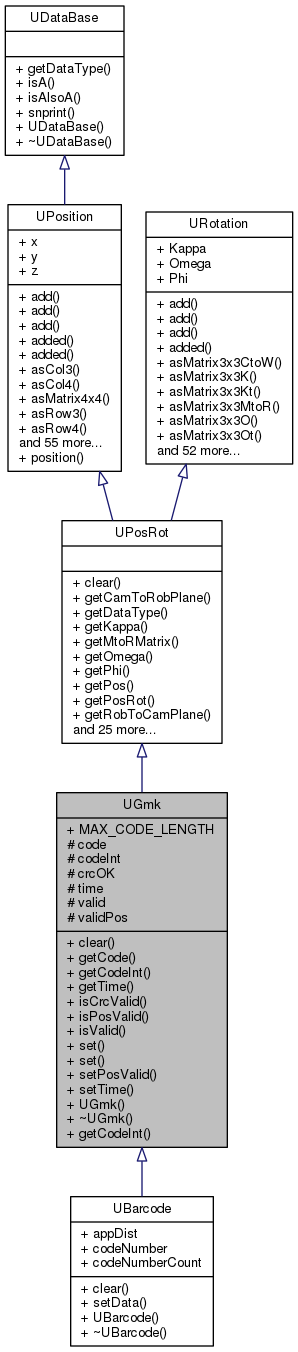
 Public Member Functions inherited from UPosRot
Public Member Functions inherited from UPosRot 1.8.11
1.8.11

