|
AURobotServers
4
|
#include <usmrcl.h>
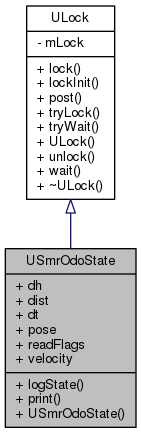
Public Member Functions | |
| void | logState (FILE *logf) |
| void | print (const char *prestring) |
| USmrOdoState () | |
 Public Member Functions inherited from ULock Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
Public Attributes | |
| double | dh |
| double | dist |
| double | dt |
| UPoseTime | pose |
| unsigned int | readFlags |
| double | velocity |
Class to hold current odometry state from the robot The class is protected by a lock, that should be used before read and write of consistent data
| void USmrOdoState::logState | ( | FILE * | logf | ) |
Log state to logfile
References dh, dist, dt, UTime::GetMilisec(), UTime::getSec(), UPose::h, pose, readFlags, UPoseTime::t, velocity, UPose::x, and UPose::y.
| void USmrOdoState::print | ( | const char * | prestring | ) |
| double USmrOdoState::dh |
Turn since last update
Referenced by logState(), and USmrOdoState().
| double USmrOdoState::dist |
Total traveled distance (in m)
Referenced by logState(), print(), and USmrOdoState().
| double USmrOdoState::dt |
Time since last update
Referenced by logState(), print(), and USmrOdoState().
| UPoseTime USmrOdoState::pose |
Pose and last update time
Referenced by UResSmrIf::eventPoseUpdated(), logState(), and print().
| unsigned int USmrOdoState::readFlags |
Flags for wich data is read from rs485 bus
Referenced by logState(), and USmrOdoState().
| double USmrOdoState::velocity |
Current velocity
Referenced by UResSmrIf::eventPoseUpdated(), logState(), print(), and USmrOdoState().
 1.8.11
1.8.11

