|
AURobotServers
4
|
#include <uvarmethod.h>
Public Member Functions | |
| virtual bool | methodCall (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct=NULL, int *returnStructCnt=NULL) |
| virtual bool | methodCallV (const char *name, const char *paramOrder, UVariable *params[], UDataBase **returnStruct, int *returnStructCnt) |
| virtual | ~UVarMethodImplement () |
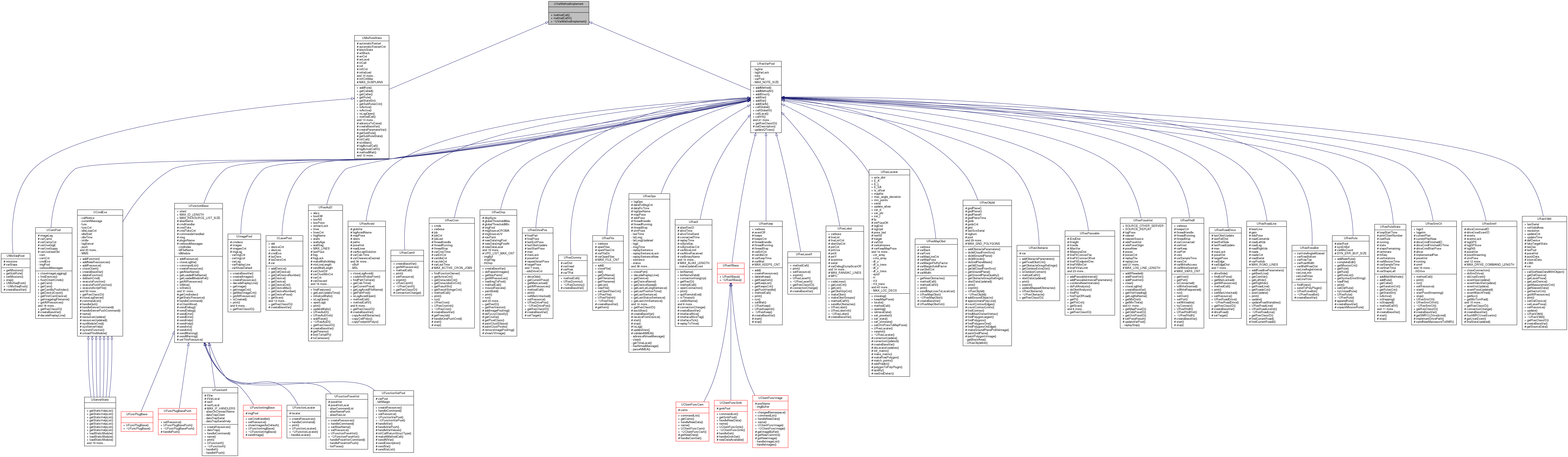
This class implements a method call, that is, the interface definition of a method call
|
inlinevirtual |
References methodCall(), and methodCallV().
|
virtual |
Function to implement a var-pool method call.
| name | is the name of the called function |
| paramOrder | is a string with one char for each parameter in the call - d is double, s is string, c is class object. |
| strings | is an array of string pointers for the string type parameters (may be NULL if not used) |
| doubles | is an array with double typed parameters (may be NULL if not used) |
| value | is the (direct) result of the class, either a double value, or 0.0 for false 1.0 for true 2.0 for implicit stop if a controll call. |
| returnStruct | is an array of class object pointers that can be used as parameters or return objects (may be NULL) |
| returnStructCnt | is the number of objects in the returnStruct buffer |
Reimplemented in UCmdExe, UResVarPool, UResPoseHist, UResKeep, UResPoly, UResLocater, UResSmrIf, UResDisp, UResCron, UResLaserIfRoad, UMisRuleState, UResAvoid, UResLaserIf, UResDrivePos, UResCamIf, UResRoadDrive, UResPcp, UFuncKinect, UResLaserIfObst, UResIf, UResSmrCtl, UFuncPpl, UFuncView, UFuncPiCam, UResDummy, and UResMapObst.
Referenced by ~UVarMethodImplement().
|
virtual |
Function to implement a var-pool method call.
| name | is the name of the called function |
| paramOrder | is a string with one char for each parameter in the call - d is double, s is string, c is class object. |
| strings | is an array of string pointers for the string type parameters (may be NULL if not used) |
| doubles | is an array with double typed parameters (may be NULL if not used) |
| value | is the (direct) result of the class, either a double value, or 0.0 for false 1.0 for true 2.0 for implicit stop if a controll call. |
| returnStruct | is an array of class object pointers that can be used as parameters or return objects (may be NULL) |
| returnStructCnt | is the number of objects in the returnStruct buffer |
Reimplemented in UResRuleState, UResPoly, UResAvoid, UMisRuleState, UResPcp, UResLobst, UFuncKinect, UFuncPiCam, UResMapObst, and UResObstacle.
Referenced by ~UVarMethodImplement().
 1.8.11
1.8.11

