|
AURobotServers
4
|
#include <ureslocater.h>
Public Member Functions | |
| void | closelog () |
| bool | keepMapPose () |
| void | locate (ULaserData *pushData, bool silent) |
| virtual bool | methodCall (const char *name, const char *paramOrder, char **strings, const double *pars, double *value, UDataBase **returnStruct=NULL, int *returnStructCnt=NULL) |
| void | openlog () |
| void | retrieveData (ULaserData *data, RangeData *rd) |
| void | set_poselast () |
| void | set_state (char *, double) |
| void | set_utmstate () |
| bool | setUtmPoseToMapPose () |
| UResLocater () | |
| void | varprint () |
| virtual | ~UResLocater () |
 Public Member Functions inherited from UResVarPool Public Member Functions inherited from UResVarPool | |
| int | addMethod (const char *formalName, const char *paramTypes, const char *comment) |
| int | addMethodV (const char *formalName, const char *paramTypes, const char *comment) |
| UVarPool * | addStruct (const char *name, const char *comment, bool copy=false) |
| UVariable * | addVar (const char *name, const double initialValue, const char *type, const char *comment) |
| UVariable * | addVar (const char *name, const char *initialValue, const char *type, const char *comment) |
| UVariable * | addVarA (const char *name, const char *initialValue, const char *type, const char *comment) |
| bool | callGlobal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callGlobalV (const char *name, const char *paramOrder, UVariable **params, UDataBase **returnStruct, int *returnStructCnt) |
| Call a method from the root var pool scope It may be in the structure direct (no '.') or in any sub-structure that the 'name.subname' indicate. More... | |
| bool | callLocal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callVS (const char *function, const char *stringParam) |
| int | callVSCD (const char *function, const char *strPar, UDataBase *data, int cooSys) |
| void | createBaseVar () |
| virtual bool | createVarSpace (const int varCnt, const int structCnt, const int methCnt, const char *note, bool copy=false) |
| bool | getGlobalString (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, double *value) |
| bool | getGlobalValue (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, bool *value) |
| bool | getGlobalValue (const char *name, UTime *value) |
| bool | getLocalValue (const char *name, double *value) |
| get a value in this variable tree More... | |
| bool | getLocalValue (const char *name, bool *value) |
| bool | getLocalValue (const char *name, UTime *value) |
| double | getLocalValue (int idx) |
| UPosition | getLocalValue3D (int idx) |
| UPosRot | getLocalValue6D (int idx) |
| bool | getLocalValueBool (int idx) |
| int | getLocalValueInt (int idx) |
| UTime | getLocalValueTime (int idx) |
| const char * | getLogFileName () |
| const char * | getVarDescription (int idx) |
| UVarCalc * | getVarPool () |
| virtual bool | gotAllResources (char *missingThese, int missingTheseCnt) |
| bool | isLogFileOpen () |
| bool | isLogFileOpen (const char *structName) |
| bool | isVarPoolUpdated (int lastCnt, int *newCnt) |
| void | logFileClose () |
| bool | logFileOpen () |
| void | logFileStart (const char *structName, bool open) |
| virtual const char * | print (const char *preString, char *buff, int buffCnt) |
| bool | setGlobalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar (int idx, double value, const int element) |
| bool | setLocalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar3D (int idx, UPosition *value) |
| bool | setLocalVar6D (int idx, UPosRot *value) |
| bool | setLocalVarAdd (int idx, double value, const int element) |
| bool | setLocalVarPose (int idx, UPose *value) |
| virtual bool | setResource (UResBase *resource, bool remove) |
| void | setVarPool (UVarCalc *sharedVarPool) |
| int | updateQTvars (int structIdx) |
| UResVarPool () | |
| virtual | ~UResVarPool () |
| Public Member Functions inherited from UResBase | |
| void | createReplayVar (UVarPool *pool) |
| virtual void | createResources () |
| UCmdExe * | getCorePointer () |
| char * | getLogFileName (char *fn, const int fnCnt) |
| int | getResFuncIdx () |
| const char * | getResID () |
| int | getResVersion () |
| bool | isA (const char *idStr) |
| bool | isAlsoA (const char *id) |
| virtual void | print (const char *preString) |
| virtual void | saveSettings () |
| void | setCorePointer (UCmdExe *serverCore) |
| void | setResFuncIdx (int idx) |
| virtual void | setResID (const char *id, const int version) |
| virtual void | stop (bool) |
| virtual void | updateReplayStatus () |
| UResBase () | |
| virtual | ~UResBase () |
| Public Member Functions inherited from UReplay | |
| void | addChild (UReplay *child) |
| virtual bool | decodeReplayLine (char *) |
| char * | getLogFileName (char *fn, const int fnCnt) |
| char * | getReplayFileName (char *fn, const int fnCnt) |
| int | getReplayLogLine () |
| bool | isReplay () |
| bool | isReplayFileOpen () |
| void | removeChild (UReplay *child) |
| virtual void | replayAdvanceTime (UTime untilTime) |
| void | replaySetBaseFileName (const char *name, const char *preName="") |
| void | replaySetFileName (const char *name) |
| virtual bool | replayStep () |
| int | replayStep (int steps) |
| virtual bool | replayToTime (UTime untilTime) |
| void | setParent (UReplay *parent) |
| bool | setReplay (bool value) |
| UReplay () | |
| virtual | ~UReplay () |
| Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
| Public Member Functions inherited from UVarMethodImplement | |
| virtual bool | methodCallV (const char *name, const char *paramOrder, UVariable *params[], UDataBase **returnStruct, int *returnStructCnt) |
| virtual | ~UVarMethodImplement () |
Public Attributes | |
| double | axle_dist |
| double | E_A |
| double | E_L |
| double | E_SA |
| double | ls_offset |
| char * | mapfile |
| double | max_angle_deviation |
| int | min_points |
| unsigned long | serial |
| bool | update_allow |
| double | var_d |
| double | var_phi |
| double | var_t |
| Public Attributes inherited from UReplay | |
| bool | replayTimeAdvancePending |
| UTime | replayTimeNow |
Protected Member Functions | |
| void | correctionUpdate (double dist_meas, double dist_pred, double ang_dev, mapline *line) |
| void | correctionUpdate3 (double dist_meas, double dist_pred, double ang_dev, double rowEndDev, mapline *line) |
| void | createBaseVar () |
| bool | doLocatorUpdates (bool updateKalman, ULogFile *logUpd, UTime updTime, UPose pose_scan, unsigned int serial) |
| void | init_matrix () |
| void | make_matrix () |
| void | makeRowPolygon (regtype reg, mapline mLine) |
| void | match_points (RangeData rd, matrix *x_, double ls_offset, UResMapbase *) |
| void | odoPredict (UPose *poseScan) |
| bool | polygonToPolyPlugin (UPolygon *poly, char *name, int coordinateSystem) |
| float | quality () |
| bool | rowEndDetect (UPose mPose, UPose lPose, double maxRange, int lineIdx, mapline *line, double *rend_dev, const char *lineName, UTime scanTime) |
| Protected Member Functions inherited from UResVarPool | |
| void | setDescription (const char *note, bool copy=false) |
| Protected Member Functions inherited from UResBase | |
| UResBase * | getStaticResource (const char *resName, bool mayCreate, bool staticOnly=true) |
| get a pointer to a static resource. More... | |
Protected Attributes | |
| ULogFile | fp |
| bool | initPoseOK |
| ULogFile | logEnd |
| logfile for updates - matlab style More... | |
| ULogFile | logUpd |
| logfile for updates - matlab style More... | |
| UPose | pose_last |
| ULogFile | testfid |
| double | ttarget |
| UVariable * | varDist |
| UVariable * | varkalmpose |
| UVariable * | varKeepMapPose |
| flag to allow update of mapPose More... | |
| UVariable * | varMaxAngleDeviation |
| UVariable * | varOdoDistScale |
| scale to multiply driven distance - to compensate for soft ground and tire variations More... | |
| UVariable * | varRowEndIn1 |
| distance inside coverage before row end detect - when expected out of range. More... | |
| UVariable * | varRowEndIn2 |
| distance inside coverage before row end detect - when expected in range More... | |
| UVariable * | varRowEndMaxDist |
| max usable distance movement for row end detection - should be covariance dependent More... | |
| UVariable * | varRowEndMaxGap |
| UVariable * | varRowExtraLog |
| UVariable * | varRowToRobotMaxDist |
| maximum distance to a row used for line end detection More... | |
| UVariable * | varRowWidthFactor |
| UVariable * | varUpdcnt |
| UVariable * | varUseAvgUpdate |
| use averaged update of locater, rather than each line individually More... | |
| UVariable * | varUseRowEnd |
| flag to allow row-end to be used More... | |
| double | xtarget |
| double | ytarget |
| Protected Attributes inherited from UResBase | |
| int | resFuncIdx |
| char | resID [MAX_RESOURCE_ID_LENGTH] |
| char | resIsAlso [MAX_RESOURCE_ISALSO_LENGTH] |
| int | resVersion |
| Protected Attributes inherited from UReplay | |
| bool | replay |
| FILE * | replayFile |
| char | replayFileName [REPLAY_FILE_NAME_LENGTH] |
| replay filename More... | |
| char | replayLine [MAX_LOG_LINE_LENGTH] |
| int | replayLogLine |
| UReplay * | replayParent |
| UTime | replayTimeNext |
Private Attributes | |
| int | cnt_array [MAPLENGTH] |
| int | cnte_array [MAPLENGTH] |
| matrix * | df_u |
| matrix * | df_u_trans |
| matrix * | df_x |
| odometry relation to covariance More... | |
| matrix * | df_x_trans |
| matrix * | eye3 |
| matrix * | H |
| connection matrix between measurement and state variables More... | |
| matrix * | H3 |
| matrix * | H3_trans |
| matrix * | H_trans |
| matrix * | K |
| kalman gain More... | |
| matrix * | K3 |
| ULocaterLineResult | locDecs [MAX_LOC_DECS] |
| detected lines More... | |
| int | locDecsCnt |
| number of detected lines More... | |
| UMatrix4 | mPu |
| UMatrix4 | mXu |
| updated locater state maintained by averaged update function More... | |
| matrix * | P |
| starte and estimated covariance matrix More... | |
| matrix * | P_ |
| matrix * | P_1 |
| temporary elements of P during odometry update More... | |
| matrix * | P_2 |
| matrix * | P_3 |
| matrix * | P_4 |
| UPolygon * | poly40 |
| UPolygon * | poly400 |
| matrix * | Q |
| state noise matrix More... | |
| matrix * | R |
| measurement error More... | |
| matrix * | R3 |
| matrix * | S |
| sensitiviti matrix for kalman gain calculation More... | |
| matrix * | S3 |
| matrix * | S3_inv |
| matrix * | S_inv |
| matrix * | tmp |
| temporary matrices More... | |
| matrix * | tmp22 |
| matrix * | tmp23 |
| matrix * | tmp31 |
| matrix * | tmp32 |
| matrix * | tmp33 |
| matrix * | x |
| state and estimate state (twice) matrix (3x1) More... | |
| matrix * | x_ |
| double | x_array [MAPLENGTH][POINTS_MAX] |
| matrix * | x_odo |
| odometry based state update More... | |
| matrix * | x_up |
| double | xe_array [MAPLENGTH][POINTS_MAX] |
| matrix * | y3_hat |
| double | y_array [MAPLENGTH][POINTS_MAX] |
| matrix * | y_hat |
| measurement change More... | |
| double | ye_array [MAPLENGTH][POINTS_MAX] |
| matrix * | z |
| measurement vector Z={d; th} Z3 = {d, th, t} More... | |
| matrix * | z3 |
Static Private Attributes | |
| static const int | MAX_LOC_DECS = 20 |
Additional Inherited Members | |
| Static Public Member Functions inherited from UResVarPool | |
| static const char * | getResClassID () |
| Static Protected Attributes inherited from UReplay | |
| static const int | MAX_LOG_LINE_LENGTH = 10000 |
| static const int | REPLAY_FILE_NAME_LENGTH = 264 |
| max length of replay filename More... | |
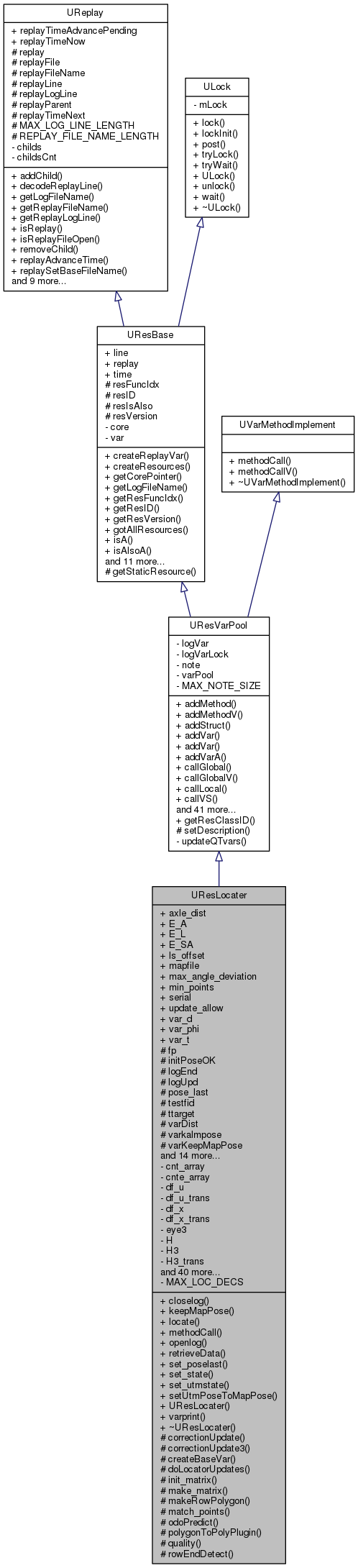
Resource to process lasterscans and detectable apriori mapped lines.
| UResLocater::UResLocater | ( | ) |
Constructor
References axle_dist, createBaseVar(), E_A, E_L, E_SA, fp, UResBase::getResVersion(), init_matrix(), initPoseOK, logEnd, logUpd, make_matrix(), max_angle_deviation, min_points, poly40, poly400, UResBase::resVersion, serial, UResVarPool::setDescription(), ULogFile::setLogName(), UResBase::setResID(), testfid, update_allow, var_d, var_phi, and var_t.
|
virtual |
Destructor
References closelog().
| void UResLocater::closelog | ( | ) |
References ULogFile::closeLog(), fp, logEnd, logUpd, and testfid.
Referenced by UFunctionLocater::handleLocater(), and ~UResLocater().
|
protected |
update state based on locater measurements of distance from row and row angle
| dist_meas | is the measured distance to row |
| dist_pred | the expected distance |
| ang_dev | difference between measured and expected angle |
| line | is the mapped row line |
References angle_normalize(), eye3, H, H_trans, K, P_, R, S, S_inv, tmp, tmp23, tmp31, tmp32, tmp33, x_, and y_hat.
Referenced by locate().
|
protected |
update state based on locater measurements of distance from row and row angle
| dist_meas | is the measured distance to row |
| dist_pred | the expected distance |
| ang_dev | difference between measured and expected angle |
| rowEndDev | is the difference is row end position |
| line | is the mapped row line |
References angle_normalize(), eye3, H3, H3_trans, K3, P_, R3, S3, S3_inv, tmp, tmp33, x_, and y3_hat.
Referenced by locate().
|
protected |
Make the variables that will be available to other plugins
References UResVarPool::addMethod(), UResVarPool::addVar(), varkalmpose, varKeepMapPose, varMaxAngleDeviation, varOdoDistScale, varRowEndIn1, varRowEndIn2, varRowEndMaxDist, varRowEndMaxGap, varRowExtraLog, varRowToRobotMaxDist, varRowWidthFactor, varUpdcnt, varUseAvgUpdate, and varUseRowEnd.
Referenced by UResLocater().
|
protected |
Implement the detections of mapped lines. NB! method to add measurements - to an average - is simplified!! no alternative solution is found - yet.
| updateKalman | skould kalman matrices be updated (else just log) |
| logUpd | pointer to logfile to use |
| updTime | is the timestamp for the source data |
| serial | is the serial number of the laserscan - for log only |
References UMatrix::add(), ULocaterLineResult::angleDelta, ULocaterLineResult::distMap, ULocaterLineResult::distMeas, UMatrix::get(), UVariable::getBool(), ULogFile::getF(), UTime::getMicrosec(), UTime::getSec(), UVariable::getValued(), UPose::h, ULocaterLineResult::hitCnt, UMatrix::init(), UMatrix::inverse(), UMatrix4::inversed(), ULogFile::isOpen(), ULocaterLineResult::line, ULocaterLineResult::lineEndDelta, ULocaterLineResult::lineEndOK, locDecs, locDecsCnt, mPu, mXu, P_, UMatrix::setCol(), UMatrix::setDiag(), UMatrix::setRC(), UMatrix::setRow(), UMatrix::setSize(), UMatrix::transpose(), var_d, var_phi, var_t, varRowEndMaxDist, varRowToRobotMaxDist, varUseRowEnd, UPose::x, x_up, and UPose::y.
Referenced by locate().
|
protected |
initialize matrices
Initialize the matrices
References df_u, df_u_trans, df_x, df_x_trans, eye3, H, H3, H3_trans, H_trans, K, K3, mPu, mXu, P, P_, P_1, P_2, P_3, P_4, Q, R, R3, S, S3, S3_inv, S_inv, UMatrix::setSize(), tmp, tmp22, tmp23, tmp31, tmp32, tmp33, var_d, var_phi, var_t, x, x_, x_odo, x_up, y3_hat, y_hat, and z.
Referenced by UResLocater().
|
inline |
Should module keep mapPose from localizer. If keepMapPose=true, then locater updates sets the mapPose. If keepMapPose=false then mapPose can be set bu the utmToMap locater function
Referenced by UFunctionLocater::handleLocater().
| void UResLocater::locate | ( | ULaserData * | pushData, |
| bool | silent | ||
| ) |
References regtype::a, UVariable::add(), UResPoseHist::addIfNeeded(), angle_deviation(), ULocaterLineResult::angleDelta, regtype::b, regtype::c, ULogFile::closeLog(), cnt_array, correctionUpdate(), correctionUpdate3(), dist2line(), ULocaterLineResult::distMap, ULocaterLineResult::distMeas, regtype::dMax, regtype::dMin, doLocatorUpdates(), fp, UVariable::getBool(), UMatrix::getData(), ULaserPool::getDefDevice(), ULaserDevice::getDevicePos(), UVariable::getDouble(), ULogFile::getF(), ULaserData::getMaxValidRange(), UTime::GetMicrosec(), UTime::getMicrosec(), ULaserDevice::getNewestData(), UResPoseHist::getPoseAtTime(), UPose::getPoseToMapPose(), ULaserData::getScanTime(), UTime::GetSec(), UTime::getSec(), ULaserData::getSerial(), UResBase::getStaticResource(), UPose::h, ULocaterLineResult::hitCnt, initPoseOK, ULogFile::isLogOpen(), ULogFile::isOpen(), ULocaterLineResult::length, ULocaterLineResult::line, linear_regression(), ULocaterLineResult::lineEndDelta, ULocaterLineResult::lineEndOK, locDecs, locDecsCnt, ULock::lock(), logEnd, logUpd, ls_offset, makeRowPolygon(), match_points(), max_angle_deviation, MAX_LOC_DECS, min_points, mPu, mXu, regtype::N, odoPredict(), ULogFile::openLog(), P, P_, pose_last, quality(), retrieveData(), rowEndDetect(), serial, UPose::set(), UPoseTVQ::set(), UVariable::setInt(), UVariable::setPose(), testfid, regtype::tMax, regtype::tMin, ULock::unlock(), update_allow, URESLOCATER_ID_OK, varkalmpose, varKeepMapPose, varMaxAngleDeviation, varRowExtraLog, varUpdcnt, varUseAvgUpdate, varUseRowEnd, ULocaterLineResult::width, x, UPosition::x, UPose::x, x_, regtype::x_array, x_array, x_up, UPose::y, regtype::y_array, and y_array.
Referenced by UFunctionLocater::handleLocater().
|
protected |
|
protected |
Make a public polygon from the points used in linear regression calculation.
| reg | is the linear regression points and result. |
| mLine | is the mapped line - for polygon naming |
References regtype::a, UPolygon::add(), regtype::b, regtype::c, UPolygon::clear(), U2Dseg::clear(), UPolygon::color, UPolygon::extractConvexTo(), U2Dlined::getOnLine(), U2Dseg::getPositionOnLine(), U2Dseg::length, regtype::N, poly40, poly400, polygonToPolyPlugin(), UPolygon::setAsPolygon(), UPolygon::setAsPolyline(), regtype::tMax, regtype::tMin, U2Dpos::x, regtype::x_array, U2Dpos::y, and regtype::y_array.
Referenced by locate().
|
protected |
Correlates laser scan points to each of the map lines in mapBase. The result is delivered in the array parameters.
| rd | is the laserscan measurements |
| x_ | matrix, that ??? |
| cnt_array | number of measurements associated to eaxh map point |
| x_array,y_array | is the associated measurements to each map line |
| cnte_array | number of measurements associated to eaxh map point |
| xe_array,ye_array | is the associated measurements to each map line, assuming endless lines |
| ls_offset | is forward position of laserscanner relative to robot origin (x-offset) |
| UResMapbase | is a pointer to the map plugin with map line information |
References angle_normalize(), cnt_array, cnte_array, dist, dist2line(), U2Dseg::getDistanceSigned(), UVariable::getDouble(), UPose::getPoseToMap(), UVariable::getValued(), UPose::h, ULock::lock(), ls_offset, OUT_OF_RANGE, RangeData::point_r, RangeData::point_x, RangeData::point_y, RangeData::points, pose_last, UPose::set(), U2Dseg::setFromPoints(), UVariable::setValued(), tv, ULock::unlock(), varDist, varRowWidthFactor, x, U2Dpos::x, UPose::x, x_array, xe_array, U2Dpos::y, UPose::y, y_array, and ye_array.
Referenced by locate().
|
virtual |
The varPool has methods, and a call to one of these is needed. Do the call now and return (a double sized) result in 'value' and return true if the method call is allowed. If the returnStruct and returnStructCnt is not NULL, then a number (no more than initial value of returnStructCnt) of structures based on UDataBase may be returned into returnStruct array of pointers. The returnStructCnt should be modified to the actual number of used pointers (if needed). If the call is allowed, but the result is invalid for some reason, the return value 'value' can be set to som agreed value, (e.g. 0.0 (false) and 1.0 for true).
Reimplemented from UResVarPool.
References set_poselast(), set_utmstate(), and setUtmPoseToMapPose().
|
protected |
update robot state in map coordinates based on odometry movement
| poseScan | pose at current laser scan time. |
References angle_normalize(), axle_dist, df_u, df_u_trans, df_x, df_x_trans, E_A, E_L, E_SA, extract_control(), UVariable::getValued(), P, P_, P_1, P_2, P_3, P_4, pose_last, Q, tmp32, varOdoDistScale, x, x_, and x_odo.
Referenced by locate().
| void UResLocater::openlog | ( | ) |
References fp, logUpd, ULogFile::openLog(), and testfid.
Referenced by UFunctionLocater::handleLocater().
|
protected |
Send this polygon to poly plug-in
| poly | is the polygon (or polyline to send. |
| name | is the name of the polygon |
| coordinatesystem | is 0=odo, 1=utm, 2=map coordinate system |
References UResVarPool::callGlobalV(), UVariable::getBool(), UResBase::getStaticResource(), UVariable::setDouble(), and UVariable::setValues().
Referenced by makeRowPolygon().
|
protected |
| void UResLocater::retrieveData | ( | ULaserData * | data, |
| RangeData * | rd | ||
| ) |
References ULaserData::getAngleRad(), ULaserData::getRangeCnt(), ULaserData::getRangeMeter(), OUT_OF_RANGE, RangeData::point_r, RangeData::point_th, RangeData::points, and RangeData::polarToCart().
Referenced by locate().
|
protected |
estimate a row end locationcompared to current pose.
| mPose | is current robot pose (in map coordinates) |
| lPose | is the current laser pose (in map coordinates) |
| maxRange | is max range of laser scanner (twice that distance is searched) |
| lineIdx | is the index to the row to test. |
| line | is the associated map line |
| rend_dev | is the measured deviation from old row end |
| lineName | is the descriptive name of the line |
| scantime | for logging |
if line end is out of range, then detected end must at lest 3 m inside coverage
if line expected in range, then at least (1m) past end must be visible
References ULogFile::closeLog(), cnte_array, UVariable::getBool(), ULogFile::getF(), UPose::getMapToPose(), UTime::getMicrosec(), UTime::getSec(), UVariable::getValued(), UPose::h, ULogFile::isOpen(), logEnd, ULogFile::openLog(), roundi(), serial, UPosition::set(), ULogFile::setLogName(), ULogFile::setLogNameNumber(), sqr(), varRowEndIn1, varRowEndIn2, varRowEndMaxGap, varRowExtraLog, UPose::x, x_array, xe_array, UPose::y, y_array, and ye_array.
Referenced by locate().
| void UResLocater::set_poselast | ( | ) |
References UResPoseHist::getNewest(), UResBase::getStaticResource(), ULock::lock(), pose_last, and ULock::unlock().
Referenced by UFunctionLocater::handleLocater(), and methodCall().
| void UResLocater::set_state | ( | char * | var, |
| double | val | ||
| ) |
References UResPoseHist::addIfNeeded(), angle_normalize(), UVariable::getBool(), UResPoseHist::getNewest(), UTime::getSec(), UResBase::getStaticResource(), UPose::h, initPoseOK, ULock::lock(), UTime::now(), poly40, poly400, UPoseTVQ::set(), UVariable::setPose(), UPoseTime::t, tmp, ULock::unlock(), URESLOCATER_ID_OK, varkalmpose, varKeepMapPose, x, UPose::x, and UPose::y.
Referenced by UFunctionLocater::handleLocater().
| void UResLocater::set_utmstate | ( | ) |
References UResPoseHist::addIfNeeded(), UVariable::getBool(), UPose::getMapToPosePose(), UResPoseHist::getNewest(), UPoseTVQ::getPose(), UPoseTVQ::getPoseTime(), UResBase::getStaticResource(), UPose::h, initPoseOK, ULock::lock(), OX, OY, P, P_, UPoseTVQ::q, roundi(), UPoseTVQ::set(), UVariable::setInt(), UVariable::setPose(), UPoseTime::t, ULock::unlock(), URESLOCATER_ID_SET, varkalmpose, varKeepMapPose, varUpdcnt, UPoseTVQ::vel, x, UPose::x, and UPose::y.
Referenced by UFunctionLocater::handleLocater(), and methodCall().
| bool UResLocater::setUtmPoseToMapPose | ( | ) |
Set the map pose from utmPose - if mapPose is not maintained by locater update
References UResPoseHist::addIfNeeded(), UVariable::getBool(), UPose::getMapToPosePose(), UResPoseHist::getNewest(), UResBase::getStaticResource(), UPoseTVQ::q, UPoseTime::t, URESLOCATER_ID_SET, varKeepMapPose, and UPoseTVQ::vel.
Referenced by UFunctionLocater::handleLocater(), and methodCall().
| void UResLocater::varprint | ( | ) |
References UVariable::getPose(), UPose::h, ULock::lock(), ULock::unlock(), varkalmpose, x, UPose::x, and UPose::y.
Referenced by UFunctionLocater::handleLocater().
| double UResLocater::axle_dist |
Referenced by UFunctionLocater::handleLocater(), odoPredict(), and UResLocater().
|
private |
number of points for each map line
Referenced by locate(), and match_points().
|
private |
Referenced by match_points(), and rowEndDetect().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
odometry relation to covariance
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
| double UResLocater::E_A |
Noise variables for control signals
Referenced by UFunctionLocater::handleLocater(), odoPredict(), and UResLocater().
| double UResLocater::E_L |
Referenced by UFunctionLocater::handleLocater(), odoPredict(), and UResLocater().
| double UResLocater::E_SA |
Referenced by UFunctionLocater::handleLocater(), odoPredict(), and UResLocater().
|
private |
Referenced by correctionUpdate(), correctionUpdate3(), init_matrix(), and make_matrix().
|
protected |
logfiles
Referenced by closelog(), locate(), openlog(), and UResLocater().
|
private |
connection matrix between measurement and state variables
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
protected |
is the startup pose initiated OK This is to avoid the map pose to be initialized from a non-valid GPS pose.
Referenced by locate(), set_state(), set_utmstate(), and UResLocater().
|
private |
kalman gain
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
detected lines
Referenced by doLocatorUpdates(), and locate().
|
private |
number of detected lines
Referenced by doLocatorUpdates(), and locate().
|
protected |
logfile for updates - matlab style
Referenced by closelog(), locate(), rowEndDetect(), and UResLocater().
|
protected |
logfile for updates - matlab style
Referenced by closelog(), locate(), openlog(), and UResLocater().
| double UResLocater::ls_offset |
Robot parameters
Referenced by locate(), and match_points().
| char* UResLocater::mapfile |
Path to mapfile
| double UResLocater::max_angle_deviation |
Update limits - angle limit
Referenced by UFunctionLocater::handleLocater(), locate(), and UResLocater().
|
staticprivate |
detection results maximum number of line detections in one scan
Referenced by locate().
| int UResLocater::min_points |
Update limits - number of correlated points
Referenced by UFunctionLocater::handleLocater(), locate(), and UResLocater().
|
private |
matrix declarations updated covariance maintained by averaged update function
Referenced by doLocatorUpdates(), init_matrix(), and locate().
|
private |
updated locater state maintained by averaged update function
Referenced by doLocatorUpdates(), init_matrix(), and locate().
|
private |
starte and estimated covariance matrix
Referenced by init_matrix(), locate(), make_matrix(), odoPredict(), and set_utmstate().
|
private |
Referenced by correctionUpdate(), correctionUpdate3(), doLocatorUpdates(), init_matrix(), locate(), make_matrix(), odoPredict(), and set_utmstate().
|
private |
temporary elements of P during odometry update
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by makeRowPolygon(), set_state(), and UResLocater().
|
private |
temporary polygon for debug
Referenced by makeRowPolygon(), set_state(), and UResLocater().
|
protected |
Referenced by locate(), match_points(), odoPredict(), and set_poselast().
|
private |
state noise matrix
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
measurement error
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
sensitiviti matrix for kalman gain calculation
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
| unsigned long UResLocater::serial |
Referenced by locate(), rowEndDetect(), and UResLocater().
|
protected |
Referenced by closelog(), locate(), openlog(), and UResLocater().
|
private |
temporary matrices
Referenced by correctionUpdate(), correctionUpdate3(), init_matrix(), make_matrix(), and set_state().
|
private |
Referenced by init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by correctionUpdate(), init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by correctionUpdate(), correctionUpdate3(), init_matrix(), and make_matrix().
|
protected |
| bool UResLocater::update_allow |
Flag indicating whether updates are allowed or not:
Referenced by UFunctionLocater::handleLocater(), locate(), and UResLocater().
| double UResLocater::var_d |
Measurement noise intensities
Referenced by doLocatorUpdates(), UFunctionLocater::handleLocater(), init_matrix(), and UResLocater().
| double UResLocater::var_phi |
Referenced by doLocatorUpdates(), UFunctionLocater::handleLocater(), init_matrix(), and UResLocater().
| double UResLocater::var_t |
Referenced by doLocatorUpdates(), init_matrix(), and UResLocater().
|
protected |
Referenced by match_points().
|
protected |
Referenced by createBaseVar(), locate(), set_state(), set_utmstate(), and varprint().
|
protected |
flag to allow update of mapPose
Referenced by createBaseVar(), locate(), set_state(), set_utmstate(), and setUtmPoseToMapPose().
|
protected |
Referenced by createBaseVar(), and locate().
|
protected |
scale to multiply driven distance - to compensate for soft ground and tire variations
Referenced by createBaseVar(), and odoPredict().
|
protected |
distance inside coverage before row end detect - when expected out of range.
Referenced by createBaseVar(), and rowEndDetect().
|
protected |
distance inside coverage before row end detect - when expected in range
Referenced by createBaseVar(), and rowEndDetect().
|
protected |
max usable distance movement for row end detection - should be covariance dependent
Referenced by createBaseVar(), and doLocatorUpdates().
|
protected |
Referenced by createBaseVar(), and rowEndDetect().
|
protected |
Referenced by createBaseVar(), locate(), and rowEndDetect().
|
protected |
maximum distance to a row used for line end detection
Referenced by createBaseVar(), and doLocatorUpdates().
|
protected |
Referenced by createBaseVar(), and match_points().
|
protected |
Referenced by createBaseVar(), locate(), quality(), and set_utmstate().
|
protected |
use averaged update of locater, rather than each line individually
Referenced by createBaseVar(), and locate().
|
protected |
flag to allow row-end to be used
Referenced by createBaseVar(), doLocatorUpdates(), and locate().
|
private |
state and estimate state (twice) matrix (3x1)
Referenced by init_matrix(), locate(), make_matrix(), match_points(), odoPredict(), set_state(), set_utmstate(), and varprint().
|
private |
Referenced by correctionUpdate(), correctionUpdate3(), init_matrix(), locate(), make_matrix(), and odoPredict().
|
private |
array of measurement points for each of the lines in the map - for line estimate
Referenced by locate(), match_points(), and rowEndDetect().
|
private |
odometry based state update
Referenced by init_matrix(), make_matrix(), and odoPredict().
|
private |
Referenced by doLocatorUpdates(), init_matrix(), locate(), and make_matrix().
|
private |
array of measurement points for each of the lines in the map - without line end test for line end test
Referenced by match_points(), and rowEndDetect().
|
protected |
|
private |
Referenced by correctionUpdate3(), init_matrix(), and make_matrix().
|
private |
Referenced by locate(), match_points(), and rowEndDetect().
|
private |
measurement change
Referenced by correctionUpdate(), init_matrix(), and make_matrix().
|
private |
Referenced by match_points(), and rowEndDetect().
|
protected |
|
private |
measurement vector Z={d; th} Z3 = {d, th, t}
Referenced by init_matrix(), and make_matrix().
|
private |
Referenced by make_matrix().
 1.8.11
1.8.11

