|
AURobotServers
4
|
#include <uressmrctl.h>
Public Member Functions | |
| bool | methodCall (const char *name, const char *paramOrder, char **strings, const double *pars, double *value, UDataBase **returnStruct=NULL, int *returnStructCnt=NULL) |
| virtual const char * | print (const char *preString, char *buff, int buffCnt) |
| void | run () |
| bool | setResource (UResBase *resource, bool remove) |
| bool | start () |
| bool | startPoseStreaming (int interval) |
| virtual void | stop (bool andWait) |
| UResSmrCtl () | |
| void | UResSmrCtlInit () |
| virtual | ~UResSmrCtl () |
 Public Member Functions inherited from UResVarPool Public Member Functions inherited from UResVarPool | |
| int | addMethod (const char *formalName, const char *paramTypes, const char *comment) |
| int | addMethodV (const char *formalName, const char *paramTypes, const char *comment) |
| UVarPool * | addStruct (const char *name, const char *comment, bool copy=false) |
| UVariable * | addVar (const char *name, const double initialValue, const char *type, const char *comment) |
| UVariable * | addVar (const char *name, const char *initialValue, const char *type, const char *comment) |
| UVariable * | addVarA (const char *name, const char *initialValue, const char *type, const char *comment) |
| bool | callGlobal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callGlobalV (const char *name, const char *paramOrder, UVariable **params, UDataBase **returnStruct, int *returnStructCnt) |
| Call a method from the root var pool scope It may be in the structure direct (no '.') or in any sub-structure that the 'name.subname' indicate. More... | |
| bool | callLocal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callVS (const char *function, const char *stringParam) |
| int | callVSCD (const char *function, const char *strPar, UDataBase *data, int cooSys) |
| void | createBaseVar () |
| virtual bool | createVarSpace (const int varCnt, const int structCnt, const int methCnt, const char *note, bool copy=false) |
| bool | getGlobalString (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, double *value) |
| bool | getGlobalValue (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, bool *value) |
| bool | getGlobalValue (const char *name, UTime *value) |
| bool | getLocalValue (const char *name, double *value) |
| get a value in this variable tree More... | |
| bool | getLocalValue (const char *name, bool *value) |
| bool | getLocalValue (const char *name, UTime *value) |
| double | getLocalValue (int idx) |
| UPosition | getLocalValue3D (int idx) |
| UPosRot | getLocalValue6D (int idx) |
| bool | getLocalValueBool (int idx) |
| int | getLocalValueInt (int idx) |
| UTime | getLocalValueTime (int idx) |
| const char * | getLogFileName () |
| const char * | getVarDescription (int idx) |
| UVarCalc * | getVarPool () |
| virtual bool | gotAllResources (char *missingThese, int missingTheseCnt) |
| bool | isLogFileOpen () |
| bool | isLogFileOpen (const char *structName) |
| bool | isVarPoolUpdated (int lastCnt, int *newCnt) |
| void | logFileClose () |
| bool | logFileOpen () |
| void | logFileStart (const char *structName, bool open) |
| bool | setGlobalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar (int idx, double value, const int element) |
| bool | setLocalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar3D (int idx, UPosition *value) |
| bool | setLocalVar6D (int idx, UPosRot *value) |
| bool | setLocalVarAdd (int idx, double value, const int element) |
| bool | setLocalVarPose (int idx, UPose *value) |
| void | setVarPool (UVarCalc *sharedVarPool) |
| int | updateQTvars (int structIdx) |
| UResVarPool () | |
| virtual | ~UResVarPool () |
| Public Member Functions inherited from UResBase | |
| void | createReplayVar (UVarPool *pool) |
| virtual void | createResources () |
| UCmdExe * | getCorePointer () |
| char * | getLogFileName (char *fn, const int fnCnt) |
| int | getResFuncIdx () |
| const char * | getResID () |
| int | getResVersion () |
| bool | isA (const char *idStr) |
| bool | isAlsoA (const char *id) |
| virtual void | print (const char *preString) |
| virtual void | saveSettings () |
| void | setCorePointer (UCmdExe *serverCore) |
| void | setResFuncIdx (int idx) |
| virtual void | setResID (const char *id, const int version) |
| virtual void | updateReplayStatus () |
| UResBase () | |
| virtual | ~UResBase () |
| Public Member Functions inherited from UReplay | |
| void | addChild (UReplay *child) |
| virtual bool | decodeReplayLine (char *) |
| char * | getLogFileName (char *fn, const int fnCnt) |
| char * | getReplayFileName (char *fn, const int fnCnt) |
| int | getReplayLogLine () |
| bool | isReplay () |
| bool | isReplayFileOpen () |
| void | removeChild (UReplay *child) |
| virtual void | replayAdvanceTime (UTime untilTime) |
| void | replaySetBaseFileName (const char *name, const char *preName="") |
| void | replaySetFileName (const char *name) |
| virtual bool | replayStep () |
| int | replayStep (int steps) |
| virtual bool | replayToTime (UTime untilTime) |
| void | setParent (UReplay *parent) |
| bool | setReplay (bool value) |
| UReplay () | |
| virtual | ~UReplay () |
| Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
| Public Member Functions inherited from UVarMethodImplement | |
| virtual bool | methodCallV (const char *name, const char *paramOrder, UVariable *params[], UDataBase **returnStruct, int *returnStructCnt) |
| virtual | ~UVarMethodImplement () |
Static Public Member Functions | |
| static const char * | getResClassID () |
| Static Public Member Functions inherited from UResVarPool | |
| static const char * | getResClassID () |
Public Attributes | |
| ULogFile | logctl |
| ULogFile | logprim |
| Public Attributes inherited from UReplay | |
| bool | replayTimeAdvancePending |
| UTime | replayTimeNow |
Protected Member Functions | |
| void | createBaseVar () |
| void | getSMRCLDrive2cmd (char *cmd, const int cmdCnt, UPoseV startPose, UPoseV endPose, double breakAt, double orderDist, bool final, UTime *t) |
| Get the command string to pass to MRC for a drive type command to this end pose (starting at the start pose). at the break distance a user event should be plased in form of a (tab) character on an otherwise empty line. More... | |
| bool | implementDrivePath (const char *driverName, UManSeq *man) |
| bool | sendNewManoeuvreToSMR (UManSeq *manseq) |
| Protected Member Functions inherited from UResVarPool | |
| void | setDescription (const char *note, bool copy=false) |
| Protected Member Functions inherited from UResBase | |
| UResBase * | getStaticResource (const char *resName, bool mayCreate, bool staticOnly=true) |
| get a pointer to a static resource. More... | |
Private Attributes | |
| pthread_t | thDrive |
Additional Inherited Members | |
| Static Protected Attributes inherited from UReplay | |
| static const int | MAX_LOG_LINE_LENGTH = 10000 |
| static const int | REPLAY_FILE_NAME_LENGTH = 264 |
| max length of replay filename More... | |
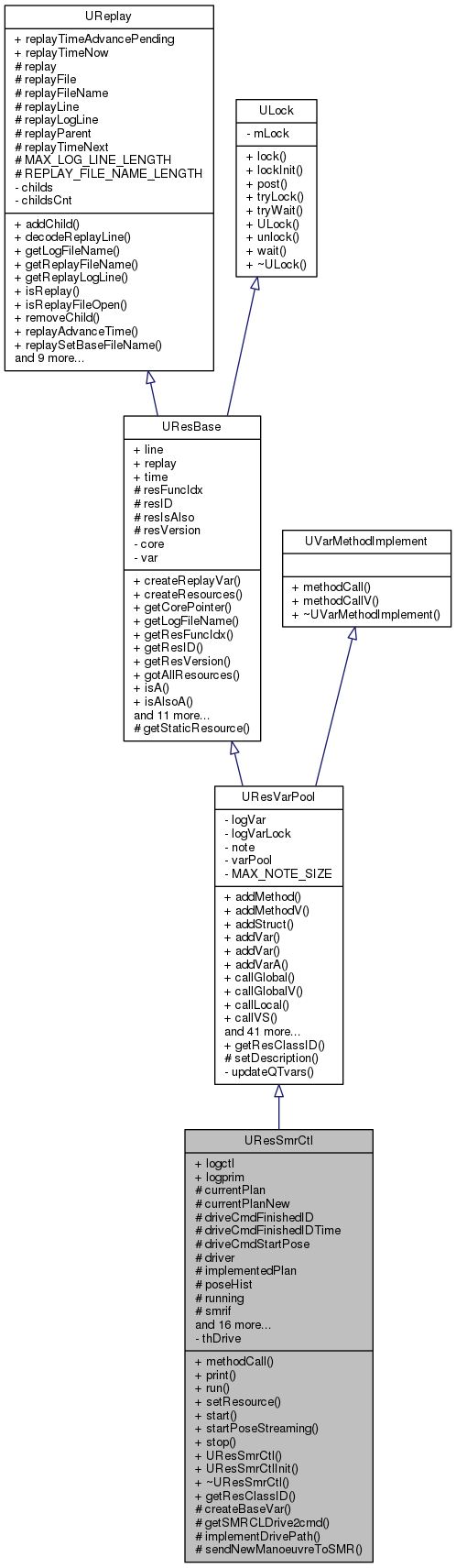
This is the shared resource class. It must enherit from the resource base class (or one of its decendent) as shown.
|
inline |
Constructor
References getResClassID(), UResBase::setResID(), UResSmrCtlInit(), and ~UResSmrCtl().
|
virtual |
Destructor
References ULogFile::closeLog(), logctl, logprim, and stop().
Referenced by UResSmrCtl().
|
protected |
Create the smrif related variables
References UResVarPool::addMethod(), UResVarPool::addVar(), UResBase::getResVersion(), varDirectOrWait, varDirectWait, varManEndID, varManEndTime, varManIsDirect, varManPlanDist, varManQueueingTime, varRenewDestDist, varRenewDestHeading, varRenewDestVel, varRenewDriveDist, varRunning, varUseDriveonDist, varUseDriveonHeading, and varUseDriveonIfDirect.
Referenced by getResClassID(), and UResSmrCtlInit().
|
inlinestatic |
Fixed name of this resource type
References createBaseVar(), getSMRCLDrive2cmd(), implementDrivePath(), methodCall(), print(), run(), sendNewManoeuvreToSMR(), setResource(), start(), startPoseStreaming(), and stop().
Referenced by UResSmrCtl().
|
protected |
Get the command string to pass to MRC for a drive type command to this end pose (starting at the start pose). at the break distance a user event should be plased in form of a (tab) character on an otherwise empty line.
| cmd | is the string buffer, where the command should be placed. |
| cmdCnt | is the size of the buffer |
| startPose | is the assumed current pose |
| endPose | is the desired end pose |
| breakAt | is the distance from start pose to placement of the tab character |
| order | distance is the end distance |
| final | indicates that the order distance is to the end of the manoeuver, and thus cam be used directly as the order distance. |
| t | is current odometry time - for debug only, may be NULL |
References ULogFile::getF(), UTime::getMicrosec(), U2Dlined::getOnLine(), UTime::getSec(), UPoseV::getVel(), UPose::h, ULogFile::isOpen(), UResBase::line, logprim, UPoseV::set(), UPose::set(), U2Dlined::setPH(), UPoseV::vel, UPose::x, and UPose::y.
Referenced by getResClassID(), and sendNewManoeuvreToSMR().
|
protected |
Implement this new short term drive plan from this driver. The plan may be discarded, if it is very close to to the last received plan from the same driver.
References UManSeq::copy(), currentPlan, currentPlanNew, driver, ULock::lock(), ULock::tryLock(), and ULock::unlock().
Referenced by getResClassID(), and methodCall().
|
virtual |
The varPool has methods, and a call to one of these are needed. Do the call now and return (a double sized) result in 'value' and return true if the method call is allowed.
Reimplemented from UResVarPool.
References UResSmrIf::doUserEvent(), driver, implementDrivePath(), UResBase::isA(), UDataString::makeString(), roundi(), UDataString::setStr(), and smrif.
Referenced by getResClassID().
|
virtual |
print status to a string buffer
Reimplemented from UResVarPool.
References driver.
Referenced by getResClassID().
| void UResSmrCtl::run | ( | ) |
Main loop - supposed to run in a thread. Checkes the waypoint list and issued commands to the smr if a new list is available.
References absf(), bool2str(), currentPlan, currentPlanNew, driveCmdStartPose, driver, UPose::getDistance(), UPose::getDistToPoseLine(), UManPPSeq::getEndPoseV(), UResPoseHist::getNewest(), UManSeq::getP2P(), UManSeq::getP2PCnt(), UVariable::getValued(), UPoseV::getVel(), UPose::h, implementedPlan, ULock::lock(), poseHist, running, sendNewManoeuvreToSMR(), UVariable::setValued(), stopFlag, ULock::tryLock(), ULock::unlock(), varManIsDirect, varRenewDestDist, varRenewDestVel, varRenewDriveDist, varRunning, Wait(), UPose::x, and UPose::y.
Referenced by getResClassID(), and startDrive().
|
protected |
Send this manoeuvre sequence to the robot real time controller
References bool2str(), UManSeq::copy(), dist, driveCmdFinishedID, driveCmdFinishedIDTime, driveCmdStartPose, UManSeq::expandMan(), UResSmrIf::getAcc(), UVariable::getBool(), UTime::getDecSec(), UPose::getDistance(), UManSeq::getDistance(), UManSeq::getDistanceFromEndPoseLine(), UManPPSeq::getEndPoseV(), UManSeq::getEndPoseV(), ULogFile::getF(), UManPPSeq::getMan(), UTime::getMicrosec(), UResSmrIf::getMinTurnRad(), UResPoseHist::getNewest(), UManSeq::getP2P(), UManSeq::getP2PCnt(), UTime::getSec(), UManPPSeq::getSeqCnt(), UManoeuvre::getSMRCLcmd2(), getSMRCLDrive2cmd(), UResSmrIf::getSpeed(), UManPPSeq::getStartPoseV(), UManSeq::getStartPoseV(), UTime::getTimePassed(), UResSmrIf::getTurnAcc(), UVariable::getValued(), UPose::h, implementedPlan, ULogFile::isOpen(), logctl, logprim, UTime::Now(), UTime::now(), poseHist, UManSeq::print(), USmrCl::sendString(), UResSmrIf::sendUserEvent(), UPoseV::set(), UManPPSeq::setMaxVel(), UVariable::setValued(), smrif, UPoseTime::t, ULogFile::toLog(), varDirectOrWait, varDirectWait, varManEndID, varManEndTime, varManIsDirect, varManPlanDist, varManQueueingTime, varUseDriveonDist, varUseDriveonHeading, varUseDriveonIfDirect, UPoseV::vel, UPose::x, and UPose::y.
Referenced by getResClassID(), and run().
|
virtual |
Called by server core when new resources are available. return true is resouurce is used Save a pointer to the resource as needed.
Reimplemented from UResVarPool.
References UResPoseHist::getOdoPoseID(), UResSmrIf::getResClassID(), UResBase::isA(), poseHist, UResVarPool::setResource(), and smrif.
Referenced by getResClassID().
| bool UResSmrCtl::start | ( | ) |
Start running in thread
References UVariable::getBool(), startDrive(), stopFlag, thDrive, and varRunning.
Referenced by getResClassID(), and UResSmrCtlInit().
| bool UResSmrCtl::startPoseStreaming | ( | int | interval | ) |
Start pose streaming - this will not be started if the control loop is not running. Returns true if stream start is send.
References UVariable::getBool(), UResSmrIf::isStreaming(), smrif, USmrCl::startOdoStream(), and varRunning.
Referenced by getResClassID(), and UFunctionSmrIf::handleSmr().
|
virtual |
Stop drive thread and close logfile
Reimplemented from UResBase.
References running, stopFlag, thDrive, and Wait().
Referenced by getResClassID(), and ~UResSmrCtl().
| void UResSmrCtl::UResSmrCtlInit | ( | ) |
Initialize class
References createBaseVar(), UResVarPool::createVarSpace(), currentPlan, currentPlanNew, driveCmdFinishedID, driver, implementedPlan, logctl, logprim, poseHist, running, ULogFile::setLogName(), smrif, start(), and stopFlag.
Referenced by UResSmrCtl().
|
protected |
Newest plan of the type UManSeq to be implemented.
Referenced by implementDrivePath(), run(), and UResSmrCtlInit().
|
protected |
Set this flag to true, when the current plan is changed
Referenced by implementDrivePath(), run(), and UResSmrCtlInit().
|
protected |
Last ID of the main part of a manoeuvre sequence
Referenced by sendNewManoeuvreToSMR(), and UResSmrCtlInit().
|
protected |
Time the last manoeuvre were implemented
Referenced by sendNewManoeuvreToSMR().
|
protected |
Latest implemented start pose
Referenced by run(), and sendNewManoeuvreToSMR().
|
protected |
Name of driver (is a string owned by the driver, and the pointer adress is used to determine a change in driver responcibility.
Referenced by implementDrivePath(), methodCall(), print(), run(), and UResSmrCtlInit().
|
protected |
Newest plan of the type UManSeq to be implemented.
Referenced by run(), sendNewManoeuvreToSMR(), and UResSmrCtlInit().
| ULogFile UResSmrCtl::logctl |
Logfile for drive controller
Referenced by UFunctionSmrIf::handleSmr(), sendNewManoeuvreToSMR(), UResSmrCtlInit(), and ~UResSmrCtl().
| ULogFile UResSmrCtl::logprim |
Logfile for drive primitives, lines and arcs, actually commanded
Referenced by getSMRCLDrive2cmd(), UFunctionSmrIf::handleSmr(), sendNewManoeuvreToSMR(), UResSmrCtlInit(), and ~UResSmrCtl().
|
protected |
Pointer to resource with current pose information
Referenced by run(), sendNewManoeuvreToSMR(), setResource(), and UResSmrCtlInit().
|
protected |
local variable is true if thread is running
Referenced by run(), stop(), and UResSmrCtlInit().
|
protected |
local variables provided by this resource. Pointer to resource with interface to MRC
Referenced by methodCall(), sendNewManoeuvreToSMR(), setResource(), startPoseStreaming(), and UResSmrCtlInit().
|
protected |
Stop non-realtime robot controller thread
Referenced by run(), start(), stop(), and UResSmrCtlInit().
|
private |
|
protected |
should direct manoeuvers be accepted only?
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
are we waiting for a direct manoeuvre?
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
Index to variable with latest user event ID posted for the latest manoeuvre
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
Index to time when the user event ID were posted for the latest manoeuvre
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
flag that indicates, that the received manoeuvre is direct to destination
Referenced by createBaseVar(), run(), and sendNewManoeuvreToSMR().
|
protected |
Index to planning distance when implementing a manoeuvre
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
Index to time it takes to queue a manoeuvre command (the latest)
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
minimum distance change in destination to trigger command renewal
Referenced by createBaseVar(), and run().
|
protected |
minimum heading change in destination to trigger command renewal.
Referenced by createBaseVar().
|
protected |
minimum velocity change in destination to trigger command renewal.
Referenced by createBaseVar(), and run().
|
protected |
distance traveled where new man should be implemented even if it looks like the old plan, (to avoid stand still).
Referenced by createBaseVar(), and run().
|
protected |
Is non-realtime robot controller thread running
Referenced by createBaseVar(), run(), start(), and startPoseStreaming().
|
protected |
variable with max deviation from end-pose line for using drive command only
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
variable with max deviation from end-pose heading for using drive command only
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
|
protected |
Use driveon command if manoeuvre indicates direct is possible
Referenced by createBaseVar(), and sendNewManoeuvreToSMR().
 1.8.11
1.8.11

