|
AURobotServers
4
|
#include <uresavoid.h>
Public Member Functions | |
| void | closeLogAvoid () |
| const char * | codeXmlRobotFront (char *buff, const int buffCnt) |
| UManSeq * | findPathToHere (UPose exitPose, double endVel, bool exitPoseRel, UTime *tod, bool directTestOnly) |
| UTime | getCalcTime () |
| UPose | getCurrentPose () |
| const char * | getLogAvoidFileName () |
| UAvoidPathPool * | getPathPool () |
| bool | isLogAvoidOpen () |
| virtual bool | methodCall (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct=NULL, int *returnStructCnt=NULL) |
| virtual bool | methodCallV (const char *name, const char *paramOrder, UVariable *params[], UDataBase **returnStruct, int *returnStructCnt) |
| bool | openLogAvoid () |
| virtual const char * | print (const char *preString, char *buff, int buffCnt) |
| bool | setResource (UResBase *resource, bool remove) |
| virtual const char * | snprint (const char *preString, char *buff, int buffCnt) |
| UResAvoid () | |
| void | UResAvoidInit () |
| bool | useRev2 () |
| virtual | ~UResAvoid () |
 Public Member Functions inherited from UResVarPool Public Member Functions inherited from UResVarPool | |
| int | addMethod (const char *formalName, const char *paramTypes, const char *comment) |
| int | addMethodV (const char *formalName, const char *paramTypes, const char *comment) |
| UVarPool * | addStruct (const char *name, const char *comment, bool copy=false) |
| UVariable * | addVar (const char *name, const double initialValue, const char *type, const char *comment) |
| UVariable * | addVar (const char *name, const char *initialValue, const char *type, const char *comment) |
| UVariable * | addVarA (const char *name, const char *initialValue, const char *type, const char *comment) |
| bool | callGlobal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callGlobalV (const char *name, const char *paramOrder, UVariable **params, UDataBase **returnStruct, int *returnStructCnt) |
| Call a method from the root var pool scope It may be in the structure direct (no '.') or in any sub-structure that the 'name.subname' indicate. More... | |
| bool | callLocal (const char *name, const char *paramOrder, char **strings, const double *doubles, double *value, UDataBase **returnStruct, int *returnStructCnt) |
| bool | callVS (const char *function, const char *stringParam) |
| int | callVSCD (const char *function, const char *strPar, UDataBase *data, int cooSys) |
| void | createBaseVar () |
| virtual bool | createVarSpace (const int varCnt, const int structCnt, const int methCnt, const char *note, bool copy=false) |
| bool | getGlobalString (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, double *value) |
| bool | getGlobalValue (const char *name, const char **value) |
| bool | getGlobalValue (const char *name, bool *value) |
| bool | getGlobalValue (const char *name, UTime *value) |
| bool | getLocalValue (const char *name, double *value) |
| get a value in this variable tree More... | |
| bool | getLocalValue (const char *name, bool *value) |
| bool | getLocalValue (const char *name, UTime *value) |
| double | getLocalValue (int idx) |
| UPosition | getLocalValue3D (int idx) |
| UPosRot | getLocalValue6D (int idx) |
| bool | getLocalValueBool (int idx) |
| int | getLocalValueInt (int idx) |
| UTime | getLocalValueTime (int idx) |
| const char * | getLogFileName () |
| const char * | getVarDescription (int idx) |
| UVarCalc * | getVarPool () |
| virtual bool | gotAllResources (char *missingThese, int missingTheseCnt) |
| bool | isLogFileOpen () |
| bool | isLogFileOpen (const char *structName) |
| bool | isVarPoolUpdated (int lastCnt, int *newCnt) |
| void | logFileClose () |
| bool | logFileOpen () |
| void | logFileStart (const char *structName, bool open) |
| bool | setGlobalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar (int idx, double value, const int element) |
| bool | setLocalVar (const char *name, const double value, bool mayAdd) |
| Assigns a value to a variable. The variable may be a part of a structure. More... | |
| bool | setLocalVar3D (int idx, UPosition *value) |
| bool | setLocalVar6D (int idx, UPosRot *value) |
| bool | setLocalVarAdd (int idx, double value, const int element) |
| bool | setLocalVarPose (int idx, UPose *value) |
| void | setVarPool (UVarCalc *sharedVarPool) |
| int | updateQTvars (int structIdx) |
| UResVarPool () | |
| virtual | ~UResVarPool () |
| Public Member Functions inherited from UResBase | |
| void | createReplayVar (UVarPool *pool) |
| virtual void | createResources () |
| UCmdExe * | getCorePointer () |
| char * | getLogFileName (char *fn, const int fnCnt) |
| int | getResFuncIdx () |
| const char * | getResID () |
| int | getResVersion () |
| bool | isA (const char *idStr) |
| bool | isAlsoA (const char *id) |
| virtual void | print (const char *preString) |
| virtual void | saveSettings () |
| void | setCorePointer (UCmdExe *serverCore) |
| void | setResFuncIdx (int idx) |
| virtual void | setResID (const char *id, const int version) |
| virtual void | stop (bool) |
| virtual void | updateReplayStatus () |
| UResBase () | |
| virtual | ~UResBase () |
| Public Member Functions inherited from UReplay | |
| void | addChild (UReplay *child) |
| virtual bool | decodeReplayLine (char *) |
| char * | getLogFileName (char *fn, const int fnCnt) |
| char * | getReplayFileName (char *fn, const int fnCnt) |
| int | getReplayLogLine () |
| bool | isReplay () |
| bool | isReplayFileOpen () |
| void | removeChild (UReplay *child) |
| virtual void | replayAdvanceTime (UTime untilTime) |
| void | replaySetBaseFileName (const char *name, const char *preName="") |
| void | replaySetFileName (const char *name) |
| virtual bool | replayStep () |
| int | replayStep (int steps) |
| virtual bool | replayToTime (UTime untilTime) |
| void | setParent (UReplay *parent) |
| bool | setReplay (bool value) |
| UReplay () | |
| virtual | ~UReplay () |
| Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
| Public Member Functions inherited from UVarMethodImplement | |
| virtual | ~UVarMethodImplement () |
Static Public Member Functions | |
| static const char * | getResClassID () |
| Static Public Member Functions inherited from UResVarPool | |
| static const char * | getResClassID () |
Protected Member Functions | |
| void | createBaseVar () |
| Protected Member Functions inherited from UResVarPool | |
| void | setDescription (const char *note, bool copy=false) |
| Protected Member Functions inherited from UResBase | |
| UResBase * | getStaticResource (const char *resName, bool mayCreate, bool staticOnly=true) |
| get a pointer to a static resource. More... | |
Protected Attributes | |
| UResVarPool * | globVar |
| char | logAvoidName [MAX_FILENAME_LENGTH] |
| UResPoseHist * | mapPose |
| UReacObstGrps | obsts |
| UAvoidPathPool * | paths |
| UResPoseHist * | poseHist |
| UReacRoadLines | roadLines |
| UVariable * | varAcceptSolution |
| accept mid-point solution after this number of calculations. More... | |
| UVariable * | varCalcTime |
| debugDump flag, when true a full data dump (or as much as planned in code) is dumped to logfile. More... | |
| UVariable * | varClearenceDesired |
| desired clearence to obstacles (new method) More... | |
| UVariable * | varClearenceMinimum |
| minimum allowed clearence to obstacles (new method) More... | |
| UVariable * | varCrashTest |
| When set to true more debug info is returned to client and logged. More... | |
| UVariable * | varDebugDump |
| debugDump flag, when true a full data dump (or as much as planned in code) is dumped to logfile. More... | |
| UVariable * | varDriveonGA |
| drivon angle gain parameter More... | |
| UVariable * | varDriveonGD |
| driveon distance gain parameter More... | |
| UVariable * | varFollowLineOnLastPose |
| should destination pose line be used in a line drive as soon as possible More... | |
| UVariable * | varForwardAngle |
| allow forward solutions only - positive or negative (radians) More... | |
| UVariable * | varFrontLeft |
| UVariable * | varFrontRight |
| UVariable * | varIgnoreCloseObst |
| debug maximum of allowed close obstacles that are to be ignored More... | |
| UVariable * | varIgnoreObstacles |
| flag to set if obstacles (all) are to be ignored - path to bosition only) More... | |
| UVariable * | varMakeAvoidObstPolygon |
| debug make also generated obstacles to polygons More... | |
| UVariable * | varMakeCellCostLine |
| debug flag - make polyline from the cell path cost lines More... | |
| UVariable * | varMakeCellPolygon |
| debug flag - makeCellPolygon - 0 = no cells, 1= all cells 2=traversed cells More... | |
| UVariable * | varMakeCellPolygonMaxY |
| debug limit of polygon size (for display only) More... | |
| UVariable * | varMakeCellVertexLine |
| debug flag - make polyline from vertex-points from current to target position More... | |
| UVariable * | varMakeFootprintPolygon |
| debug flag - makeCellPolygon - boolean More... | |
| UVariable * | varManCnt |
| UVariable * | varMaxAcc |
| maximum lateral acceleration More... | |
| UVariable * | varMaxAvoidLoops |
| maximum number of loops for midPose search More... | |
| UVariable * | varMaxNestedSpawns |
| number of nested levels More... | |
| UVariable * | varMaxOG |
| number of obstacle groups used for obstacle avoidance More... | |
| UVariable * | varMaxSpawnCount |
| maximum spawn count limit More... | |
| UVariable * | varMaxTangentDepth |
| maximumber of tantents to search for the visibility graph More... | |
| UVariable * | varMaxTangentToMan |
| Maximum number of tangent sequences testes, if first sequences fails in manoeuvre generation. More... | |
| UVariable * | varMaxTurnAcc |
| maximum acceleration in turns More... | |
| UVariable * | varMinTurnRadius |
| minimum allowed turn radius More... | |
| UVariable * | varObstMinDist |
| (old method - (desired) minimum distance to obstacle More... | |
| UVariable * | varObstMinMinDist |
| (old method - absolute minimum distance to obstacle More... | |
| UVariable * | varRev2 |
| UVariable * | varRev2cell |
| UVariable * | varSerial |
| UVariable * | varUseAnyResult |
| debug flag - use any solution More... | |
| UVariable * | varUseDriveon |
| Use drivon manoeuver planning. More... | |
| Protected Attributes inherited from UResBase | |
| int | resFuncIdx |
| char | resID [MAX_RESOURCE_ID_LENGTH] |
| char | resIsAlso [MAX_RESOURCE_ISALSO_LENGTH] |
| int | resVersion |
| Protected Attributes inherited from UReplay | |
| bool | replay |
| FILE * | replayFile |
| char | replayFileName [REPLAY_FILE_NAME_LENGTH] |
| replay filename More... | |
| char | replayLine [MAX_LOG_LINE_LENGTH] |
| int | replayLogLine |
| UReplay * | replayParent |
| UTime | replayTimeNext |
Private Member Functions | |
| void | copyAvoidObstacles (UAvoidPath2 *resAP) |
| void | copyCellPolys (UAvoidCellGraph *avcg) |
| void | copyFootprintPolys (UAvoidPath2 *resAP, int oldCnt) |
Private Attributes | |
| char | sBuff [MSL] |
Static Private Attributes | |
| static const int | MSL = 10000 |
Additional Inherited Members | |
| Public Attributes inherited from UReplay | |
| bool | replayTimeAdvancePending |
| UTime | replayTimeNow |
| Static Protected Attributes inherited from UReplay | |
| static const int | MAX_LOG_LINE_LENGTH = 10000 |
| static const int | REPLAY_FILE_NAME_LENGTH = 264 |
| max length of replay filename More... | |
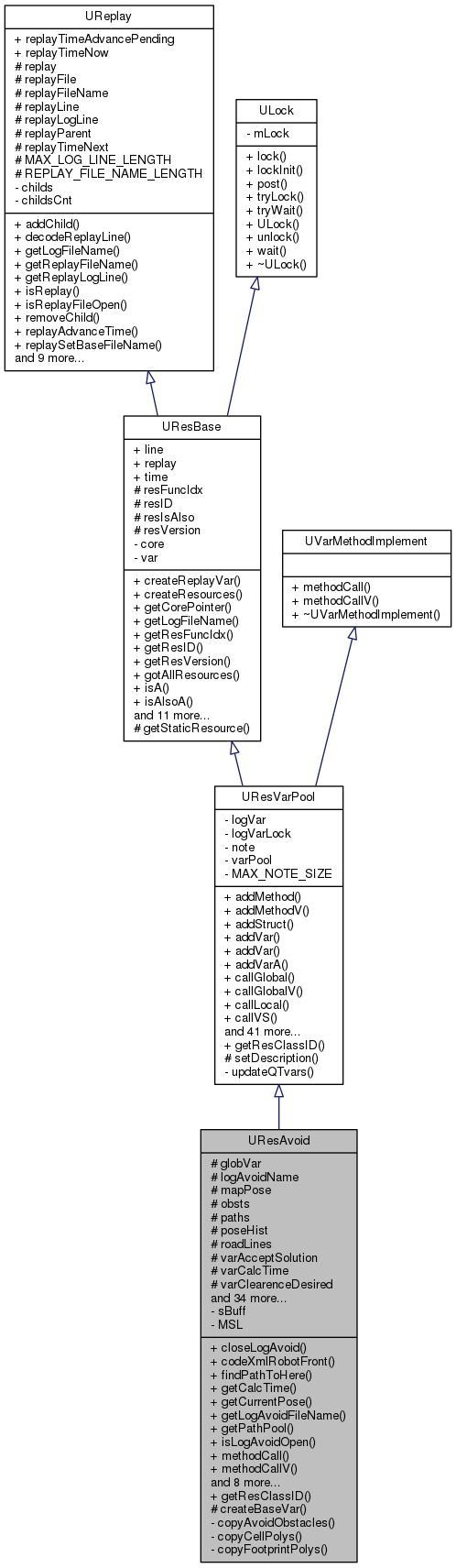
This is the shared resource class. It must enherit from the resource base class (or one of its decendent) as shown.
|
inline |
Constructor
References getResClassID(), UResBase::setResID(), UResAvoidInit(), and ~UResAvoid().
|
virtual |
| void UResAvoid::closeLogAvoid | ( | ) |
Close the logfile
References ULogFile::closeLog(), UAvoidParams::logAvoid, UAvoidPathPool::par, and paths.
Referenced by UFunctionAvoid::handleAvoid(), and isLogAvoidOpen().
| const char * UResAvoid::codeXmlRobotFront | ( | char * | buff, |
| const int | buffCnt | ||
| ) |
code front-left and front-right points as an xmlPose
| buff | is the buffer to deliver result into. |
| buffCnt | is the size of the bugger in bytes. |
References UPose::codeXml(), UVariable::get3D(), UResPoseHist::getNewest(), UPose::getPoseToMapPose(), poseHist, varFrontLeft, varFrontRight, UPosition::x, and UPosition::y.
Referenced by getCurrentPose(), and UFunctionAvoid::sendCurrentAvoidPath().
|
private |
Copy all grouped and added obstacles to polygon plugin, that is all obstacles in resAp.aogs with a point count > 2.
References UAvoidPath2::aogs, UAvoidPath2::aogsCnt, UResVarPool::callGlobalV(), UPolygon::color, UVariable::getBool(), UPolygon::getPointsCnt(), UObstacle::getSerial(), UResBase::getStaticResource(), UAvoidObst::grp, MSL, UAvoidObst::obst, UVariable::setDouble(), and UVariable::setValues().
Referenced by findPathToHere(), and getCalcTime().
|
private |
Copy cell decomposition cells as polygons in the polygon plugin using the name cellPoly.XXX
| svcg | is the cell decomposition structure |
References UResVarPool::callGlobalV(), UPolygon::clear(), UPolygon::color, UVariable::getBool(), UAvoidCellGraph::getCellPathPoly(), UAvoidCellGraph::getCellPoly(), UAvoidCellGraph::getCellsCnt(), UAvoidCellGraph::getCellsPathCnt(), UVariable::getInt(), UPolygon::getPointsCnt(), UResBase::getStaticResource(), UVariable::getValued(), MSL, UAvoidCellGraph::polyCell, UAvoidCellGraph::polyVertex, UVariable::setDouble(), UVariable::setValues(), varMakeCellCostLine, varMakeCellPolygon, varMakeCellPolygonMaxY, and varMakeCellVertexLine.
Referenced by findPathToHere(), and getCalcTime().
|
private |
Copy footprint polygons to the polygon resource for debug purposes.
| resAP | is the path definition with the footprint polygons. |
| oldCnt | is the prevoius number of polygons (that are to be deleted) |
References UResVarPool::callGlobalV(), UVariable::getBool(), UResBase::getStaticResource(), MSL, UAvoidPath2::polys, UAvoidPath2::polysCnt, UVariable::setDouble(), and UVariable::setValues().
Referenced by findPathToHere(), and getCalcTime().
|
protected |
Create the smrif related variables
References UResVarPool::addMethod(), UResVarPool::addMethodV(), UResVarPool::addStruct(), UVarPool::addVar(), UResVarPool::addVar(), UVarPool::addVarA(), varAcceptSolution, varCalcTime, varClearenceDesired, varClearenceMinimum, varCrashTest, varDebugDump, varDriveonGA, varDriveonGD, varFollowLineOnLastPose, varForwardAngle, varFrontLeft, varFrontRight, varIgnoreCloseObst, varIgnoreObstacles, varMakeAvoidObstPolygon, varMakeCellCostLine, varMakeCellPolygon, varMakeCellPolygonMaxY, varMakeCellVertexLine, varMakeFootprintPolygon, varManCnt, varMaxAcc, varMaxAvoidLoops, varMaxNestedSpawns, varMaxOG, varMaxSpawnCount, varMaxTangentDepth, varMaxTangentToMan, varMaxTurnAcc, varMinTurnRadius, varObstMinDist, varObstMinMinDist, varRev2, varRev2cell, varSerial, varUseAnyResult, and varUseDriveon.
Referenced by getCalcTime(), and UResAvoidInit().
| UManSeq * UResAvoid::findPathToHere | ( | UPose | exitPose, |
| double | endVel, | ||
| bool | exitPoseRel, | ||
| UTime * | tod, | ||
| bool | directTestOnly | ||
| ) |
Find path to this destination - and this desired (maximum) end velocity. Return the time of calculation (pose time) in 'tod'. NB! remember to call result->unlock() when no manoeuvre is longer needed.
| directTestOnly | to test direct path |
References UAvoidParams::acceptAfterSolution, UReacRoadLines::addLeftLine(), UReacObstGrps::addObstGrp(), UReacRoadLines::addRightLine(), UAvoidPath2::avCellGraph, UAvoidParams::avoidSerial, UResVarPool::callGlobal(), UAvoidParams::cellRev2, UReacRoadLines::clear(), UReacObstGrps::clear(), copyAvoidObstacles(), copyCellPolys(), copyFootprintPolys(), UAvoidParams::doCrashTest, UAvoidParams::driveonGA, UAvoidParams::driveonGD, UAvoidPathPool::findPathToHere(), UAvoidPathPool::findPathToHere2(), UAvoidParams::followLineLastPose, UAvoidParams::forwardOnly, UAvoidParams::frontLeft, UAvoidParams::frontRight, UVariable::get3D(), UVariable::getBool(), UVariable::getDouble(), UResVarPool::getGlobalValue(), UReacObstGrps::getGroup(), UReacObstGrps::getGroupsCnt(), UVariable::getInt(), UAvoidPath2::getManSeq(), UReactivePath::getManSeq(), UAvoidParams::getMinTurnRad(), UResPoseHist::getNewest(), UObstacleGroup::getObstsCnt(), UAvoidPathPool::getParamStruct(), UObstacleGroup::getPoseLast(), UTime::getSec(), UObstacleGroup::getSerial(), UAvoidPathPool::getValidAvoidPathsCnt(), UAvoidPathPool::getValidPathsCnt(), UVariable::getValued(), UResVarPool::getVarPool(), globVar, UAvoidParams::ignoreCloseObstAfter, ULogFile::isOpen(), UAvoidPath2::isValid(), ULock::lock(), UAvoidParams::logAvoid, UAvoidParams::makeCellPolygon, UAvoidParams::makeCellPolygonMaxY, UAvoidParams::makeFootprintPolygon, UAvoidParams::maxAcceleration, UAvoidParams::maxAvoidLoops, UAvoidParams::maxNestedLevels, UAvoidParams::maxSpawnCnt, UAvoidParams::maxTangentDepth, UAvoidParams::maxTangentToMan, UAvoidParams::maxTurnAcceleration, mini(), UAvoidParams::minTurnRadius, UAvoidParams::obstClearanceDesired, UAvoidParams::obstClearanceMinimum, UAvoidParams::obstMinDist, UAvoidParams::obstMinMinDist, obsts, UAvoidPath2::oldFootCnt, UAvoidPathPool::par, paths, poseHist, roadLines, UAvoidParams::scanSerial, UPoseV::set(), UVariable::setInt(), UTime::setTime(), UVariable::setTime(), UAvoidParams::startPose, UPoseTime::t, ULogFile::toLog(), ULock::unlock(), UAvoidParams::useAnyResult, UAvoidParams::useDriveon, useRev2(), varAcceptSolution, varCalcTime, varClearenceDesired, varClearenceMinimum, varCrashTest, varDebugDump, varDriveonGA, varDriveonGD, varFollowLineOnLastPose, varForwardAngle, varFrontLeft, varFrontRight, varIgnoreCloseObst, varIgnoreObstacles, varMakeAvoidObstPolygon, varMakeCellPolygon, varMakeCellPolygonMaxY, varMakeFootprintPolygon, varManCnt, varMaxAcc, varMaxAvoidLoops, varMaxNestedSpawns, varMaxOG, varMaxSpawnCount, varMaxTangentDepth, varMaxTangentToMan, varMaxTurnAcc, varMinTurnRadius, varObstMinDist, varObstMinMinDist, varRev2, varRev2cell, varSerial, varUseAnyResult, and varUseDriveon.
Referenced by getLogAvoidFileName(), UFunctionAvoid::handleAvoid(), methodCall(), and methodCallV().
|
inline |
Get last avoidance calculation time
References copyAvoidObstacles(), copyCellPolys(), copyFootprintPolys(), createBaseVar(), UVariable::getTime(), and varCalcTime.
Referenced by UFunctionAvoid::handleAvoid().
|
inline |
Get current pose from pose-history
References codeXmlRobotFront(), UResPoseHist::getNewest(), and poseHist.
|
inline |
Get the logfile name
References findPathToHere(), and logAvoidName.
Referenced by UFunctionAvoid::handleAvoid().
|
inline |
Get pointer to path pool
References methodCall(), methodCallV(), paths, and useRev2().
Referenced by UFunctionAvoid::handleAvoid(), UFunctionAvoid::sendCurrentAvoidPath(), and UFunctionAvoid::sendCurrentPath().
|
inlinestatic |
|
inline |
Is the logfile open
References closeLogAvoid(), ULogFile::isOpen(), UAvoidParams::logAvoid, UAvoidPathPool::par, and paths.
Referenced by UFunctionAvoid::handleAvoid().
|
virtual |
The varPool has methods, and a call to one of these are needed. Do the call now and return (a double sized) result in 'value'. Return true if the method call is allowed. "getAvoidPath", "ddd": Find path to exit position. The found route is returned in the 'returnStruct' pointer array. The pointers in the array will be redirected to the static set of manoeuvre buffers in the avoid function, i.e. the result should be used before the next call to 'getAvoidPath'.
Reimplemented from UResVarPool.
References findPathToHere(), UManSeq::getMaxTurnArc(), UResPoseHist::getNewest(), UPose::h, ULogFile::isOpen(), limitToPi(), UAvoidParams::logAvoid, MSL, UAvoidPathPool::par, paths, poseHist, UManSeq::print(), sBuff, UPose::set(), and ULogFile::toLog().
Referenced by getPathPool().
|
virtual |
The varPool has methods, and a call to one of these are requested. The parameters hold the requested method name, parameter list, parameters, and an array of pointers for the result. All parameters and results are of type UVariable.
| name | is the method name (within this variable pool) |
| paramOrder | is the parameter sequence d=double structure or array |
| params | is the array of UVariable pointers with the values |
| returnStruct | is an array of pointers (to UDataBase structures, either UVariable or another class based on UDataBase), may be NULL pointers or pointers to actual result variables or classes - as specified in the method definition. |
| returnStructCnt | is the actual number of returned structure pointers. |
Reimplemented from UVarMethodImplement.
References UManSeq::copy(), findPathToHere(), UManSeq::getMaxTurnArc(), UResPoseHist::getNewest(), UVariable::getPose(), UPose::h, UResBase::isA(), ULogFile::isOpen(), UAvoidParams::logAvoid, MSL, UAvoidPathPool::par, paths, poseHist, UManSeq::print(), ULogFile::toLog(), ULock::unlock(), UPose::x, and UPose::y.
Referenced by getPathPool().
| bool UResAvoid::openLogAvoid | ( | ) |
Open logfile - the name is always avoid.log and is placed in the dataPath. The full name is available in 'logAvoidName'.
References ULogFile::closeLog(), ULogFile::isOpen(), UAvoidParams::logAvoid, ULogFile::openLog(), UAvoidPathPool::par, and paths.
Referenced by UFunctionAvoid::handleAvoid(), and snprint().
|
virtual |
Fixed varsion number for this resource type. Should follow release version, i.e. version 1.28 gives number 128. Should be incremented only when there is change to this class definition, i.e new or changed functions or variables. print status to a string buffer
Reimplemented from UResVarPool.
Referenced by getResClassID(), and snprint().
|
virtual |
The server will offer a resource pointer by this call. If the resource is used, please return true.
Reimplemented from UResVarPool.
References UResPoseHist::getMapPoseID(), UResPoseHist::getOdoPoseID(), UResVarPool::getResClassID(), globVar, UResBase::isA(), mapPose, poseHist, and UResVarPool::setResource().
Referenced by snprint().
|
inlinevirtual |
print status to a string buffer
References openLogAvoid(), print(), and setResource().
| void UResAvoid::UResAvoidInit | ( | ) |
Initialize class
References createBaseVar(), UResVarPool::createVarSpace(), ULogFile::getLogFileName(), globVar, UAvoidParams::logAvoid, logAvoidName, mapPose, MAX_FILENAME_LENGTH, UAvoidPathPool::par, paths, poseHist, and ULogFile::setLogName().
Referenced by UResAvoid().
| bool UResAvoid::useRev2 | ( | ) |
Is the obstacle avoidance a rev1 or rev 2 calculation
References UVariable::getBool(), and varRev2.
Referenced by findPathToHere(), getPathPool(), and UFunctionAvoid::handleAvoid().
|
protected |
Global variables to access obstacles and road lines
Referenced by findPathToHere(), setResource(), and UResAvoidInit().
|
protected |
Filename for obstacle avoidance logging
Referenced by getLogAvoidFileName(), and UResAvoidInit().
|
protected |
Pose history
Referenced by setResource(), and UResAvoidInit().
|
staticprivate |
a common string buffer for logging
Referenced by copyAvoidObstacles(), copyCellPolys(), copyFootprintPolys(), methodCall(), and methodCallV().
|
protected |
Obstacles to avoid
Referenced by findPathToHere().
|
protected |
Pool of alternative paths generated in responce to the obstacles and road lines
Referenced by closeLogAvoid(), findPathToHere(), getPathPool(), isLogAvoidOpen(), methodCall(), methodCallV(), openLogAvoid(), UResAvoidInit(), and ~UResAvoid().
|
protected |
Pose history
Referenced by codeXmlRobotFront(), findPathToHere(), getCurrentPose(), methodCall(), methodCallV(), setResource(), and UResAvoidInit().
|
protected |
Road lines to respect
Referenced by findPathToHere().
|
private |
Referenced by methodCall().
|
protected |
accept mid-point solution after this number of calculations.
Referenced by createBaseVar(), and findPathToHere().
|
protected |
debugDump flag, when true a full data dump (or as much as planned in code) is dumped to logfile.
Referenced by createBaseVar(), findPathToHere(), and getCalcTime().
|
protected |
desired clearence to obstacles (new method)
Referenced by createBaseVar(), and findPathToHere().
|
protected |
minimum allowed clearence to obstacles (new method)
Referenced by createBaseVar(), and findPathToHere().
|
protected |
When set to true more debug info is returned to client and logged.
Referenced by createBaseVar(), and findPathToHere().
|
protected |
debugDump flag, when true a full data dump (or as much as planned in code) is dumped to logfile.
Referenced by createBaseVar(), and findPathToHere().
|
protected |
drivon angle gain parameter
Referenced by createBaseVar(), and findPathToHere().
|
protected |
driveon distance gain parameter
Referenced by createBaseVar(), and findPathToHere().
|
protected |
should destination pose line be used in a line drive as soon as possible
Referenced by createBaseVar(), and findPathToHere().
|
protected |
allow forward solutions only - positive or negative (radians)
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Index to variable most problematic front left position
Referenced by codeXmlRobotFront(), createBaseVar(), and findPathToHere().
|
protected |
Index to variable most problematic front right position
Referenced by codeXmlRobotFront(), createBaseVar(), and findPathToHere().
|
protected |
debug maximum of allowed close obstacles that are to be ignored
Referenced by createBaseVar(), and findPathToHere().
|
protected |
flag to set if obstacles (all) are to be ignored - path to bosition only)
Referenced by createBaseVar(), and findPathToHere().
|
protected |
debug make also generated obstacles to polygons
Referenced by createBaseVar(), and findPathToHere().
|
protected |
debug flag - make polyline from the cell path cost lines
Referenced by copyCellPolys(), and createBaseVar().
|
protected |
debug flag - makeCellPolygon - 0 = no cells, 1= all cells 2=traversed cells
Referenced by copyCellPolys(), createBaseVar(), and findPathToHere().
|
protected |
debug limit of polygon size (for display only)
Referenced by copyCellPolys(), createBaseVar(), and findPathToHere().
|
protected |
debug flag - make polyline from vertex-points from current to target position
Referenced by copyCellPolys(), and createBaseVar().
|
protected |
debug flag - makeCellPolygon - boolean
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Index to variable with manoeuvre count
Referenced by createBaseVar(), and findPathToHere().
|
protected |
maximum lateral acceleration
Referenced by createBaseVar(), and findPathToHere().
|
protected |
maximum number of loops for midPose search
Referenced by createBaseVar(), and findPathToHere().
|
protected |
number of nested levels
Referenced by createBaseVar(), and findPathToHere().
|
protected |
number of obstacle groups used for obstacle avoidance
Referenced by createBaseVar(), and findPathToHere().
|
protected |
maximum spawn count limit
Referenced by createBaseVar(), and findPathToHere().
|
protected |
maximumber of tantents to search for the visibility graph
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Maximum number of tangent sequences testes, if first sequences fails in manoeuvre generation.
Referenced by createBaseVar(), and findPathToHere().
|
protected |
maximum acceleration in turns
Referenced by createBaseVar(), and findPathToHere().
|
protected |
minimum allowed turn radius
Referenced by createBaseVar(), and findPathToHere().
|
protected |
(old method - (desired) minimum distance to obstacle
Referenced by createBaseVar(), and findPathToHere().
|
protected |
(old method - absolute minimum distance to obstacle
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Index to boolean flag selecting wich obstacle avoidance method to use
Referenced by createBaseVar(), findPathToHere(), and useRev2().
|
protected |
Index to boolean flag selecting wich cell decomposition method
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Index to boolean flag selecting wich obstacle avoidance method to use
Referenced by createBaseVar(), and findPathToHere().
|
protected |
debug flag - use any solution
Referenced by createBaseVar(), and findPathToHere().
|
protected |
Use drivon manoeuver planning.
Referenced by createBaseVar(), and findPathToHere().
 1.8.11
1.8.11

