|
AURobotServers
4
|
Public Member Functions | |
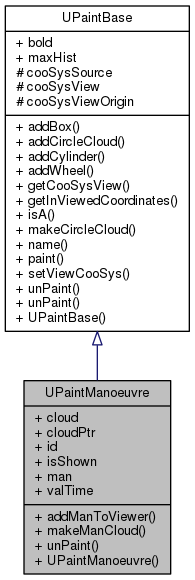
| void | addManToViewer (UClientManSeq *manoeuvre, pcl::visualization::PCLVisualizer *viewer) |
| void | makeManCloud () |
| void | unPaint (pcl::visualization::PCLVisualizer *viewer) |
| UPaintManoeuvre () | |
| constructor More... | |
 Public Member Functions inherited from UPaintBase Public Member Functions inherited from UPaintBase | |
| void | addBox (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x, double y, double z, const char *id, const double color[3]) |
| void | addCircleCloud (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::PointCloud< pcl::PointXYZ >::Ptr *cloud, double x, double y, double h, double radius, const char *ID) |
| void | addCylinder (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x1, double y1, double z1, double x2, double y2, double z2, double radius, const char *id, const double color[3]) |
| void | addWheel (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x, double y, double h, double radius, double width, const char *id) |
| const int | getCooSysView () |
| pcl::PointXYZ | getInViewedCoordinates (UPose *local, int cooSysLocal, double z) |
| bool | isA (const char *testName) |
| void | makeCircleCloud (pcl::PointCloud< pcl::PointXYZ > *cloud, UMatrix4 *pose, double radius) |
| virtual const char * | name () |
| virtual void | paint (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer) |
| virtual void | setViewCooSys (int refSystem, UPose origin) |
| virtual void | unPaint (pcl::visualization::PCLVisualizer *viewer, int viewMaxHist) |
| UPaintBase () | |
Public Attributes | |
| pcl::PointCloud< pcl::PointXYZ > * | cloud |
| point cloud for the polygon More... | |
| pcl::PointCloud< pcl::PointXYZ >::Ptr * | cloudPtr |
| boost pointer to the cloud More... | |
| int | id |
| manoeuver id number More... | |
| bool | isShown |
| is polygon shown More... | |
| UClientManSeq * | man |
| manoeuvre sequence More... | |
| UTime | valTime |
| time the manouvre is valid More... | |
| Public Attributes inherited from UPaintBase | |
| bool | bold |
| int | maxHist |
Additional Inherited Members | |
| Protected Attributes inherited from UPaintBase | |
| int | cooSysSource |
| int | cooSysView |
| UPose | cooSysViewOrigin |
|
inline |
constructor
|
inline |
add cloud to the viewer - removing the older
| manoeuvre | is polygon to view. |
| viewer | is the 3D viewer |
References UPaintBase::bold, UPaintPcp::cloudPtr, UClientManSeq::getUpdTime(), and UClientManSeq::isBest().
Referenced by UPaintManoeuvres::paintManData().
|
inline |
Paint this scan into a pointcloud
References absd(), UManArc::getEndPoseV(), UManoeuvre::getEndPoseV(), UPaintBase::getInViewedCoordinates(), UManPPSeq::getMan(), UManoeuvre::getManType(), UManSeq::getP2P(), UManSeq::getP2PCnt(), UManPPSeq::getSeqCnt(), UManSeq::getStartPoseV(), UManArc::getTurnAngle(), UManArc::getTurnRadius(), UManoeuvre::MAN_ARC, UManoeuvre::MAN_LINE, UManArc::setTurnAngle(), UManArc::setTurnRadius(), and signofd().
|
inlinevirtual |
Remove point cloud from viewer
Reimplemented from UPaintBase.
Referenced by UPaintManoeuvres::paintManData(), and UPaintManoeuvres::unPaintAll().
| pcl::PointCloud<pcl::PointXYZ>* UPaintManoeuvre::cloud |
point cloud for the polygon
| pcl::PointCloud<pcl::PointXYZ>::Ptr* UPaintManoeuvre::cloudPtr |
boost pointer to the cloud
| int UPaintManoeuvre::id |
manoeuver id number
Referenced by UPaintManoeuvres::paintManData().
| bool UPaintManoeuvre::isShown |
is polygon shown
| UClientManSeq* UPaintManoeuvre::man |
manoeuvre sequence
| UTime UPaintManoeuvre::valTime |
time the manouvre is valid
Referenced by UPaintManoeuvres::paintManData().
 1.8.11
1.8.11

