|
AURobotServers
4
|
#include <umanseq.h>
Public Member Functions | |
| bool | addMan (UPoseV fromPose, UPoseV toPose, double maxAcc, double maxTurnAcc, double minTurnRad, double *okVel=NULL) |
| bool | addManDriveon (UPoseV fromPose, UPoseV toPose, double turnRad) |
| UManPPSeq * | addP2P () |
| bool | copy (UManSeq *source) |
| bool | expandMan (UPoseV fromPose, UPoseV toPose, bool last, double maxAcc, double maxTurnAcc, double minTurnRad, UManPPSeq *ppSeq, double *okVel) |
| bool | expandManDriveon (UPoseV fromPose, UPoseV toPose, double turnRad, UManPPSeq *ppSeq) |
| void | fprint (FILE *fd, const char *prestr) |
| void | freeAll () |
| virtual const char * | getDataType () |
| double | getDeviationFromDirect () |
| double | getDistance () |
| double | getDistanceFromEndPoseLine (double *maxHeading) |
| Calculate the distance from the end-pose line to the point on the manoeuvre furthest away from the line. Only the start/end points of each manoeuvere is used, so if one of the pose to pose manoeuvres has an almost full circle, then the circle is not counted. More... | |
| double | getDistanceXYSigned (UPosition pos, int *where, bool posIsRight, double maxDist, UPose *pHit, int *idx, double *t) |
| UPoseV | getEndPoseV () |
| double | getMaxTurnArc () |
| double | getMinDistanceXYSigned (ULineSegment *seg, int *whereOnSeg, UPosition *posOnSeg, bool posIsRight, double maxDist, int *whereOnMan, UPose *poseOnMan, int *idx) |
| double | getNeededAcc (double startVel, double endVel, double distance) |
| double | getNeededDist (double startVel, double endVel, double acc) |
| UManoeuvre * | getNewArc (double radius, double angle, bool left, double acceleration, double targetVel) |
| UManoeuvre * | getNewArc (double radius, double angle, double acceleration, double targetVel) |
| UManoeuvre * | getNewLine (double dist, double acceleration, double targetVel) |
| UManoeuvre * | getNewStop () |
| UManPPSeq * | getP2P (int idx) |
| int | getP2PCnt () |
| UPoseV | getPoseV (double atManTime) |
| UPoseV | getStartPoseV () |
| double | getTime () |
| bool | isValid () |
| const char * | print (const char *prestr, char *buff, const int buffCnt) |
| void | releaseAll (UManPPSeq *ppseq) |
| void | releaseAllMan () |
| void | releaseLast () |
| void | removeLastArc () |
| bool | replaceMan (UPoseV midPose, bool fixate, double maxAcc, double maxTurnAcc, double minTurnRad, int fromIdx, int toIdx, bool newEndpoint, double *okVel) |
| bool | replaceManDriveon (UPoseV midPose, bool fixate, double turnRad, int fromIdx, int toIdx, bool newEndpoint) |
| int | reusableCnt () |
| void | truncate (UManPPSeq *ppseq, int newCnt) |
| UManSeq () | |
| ~UManSeq () | |
 Public Member Functions inherited from ULock Public Member Functions inherited from ULock | |
| bool | lock () |
| void | lockInit () |
| void | post () |
| bool | tryLock () |
| bool | tryWait () |
| ULock () | |
| void | unlock () |
| bool | wait () |
| ~ULock () | |
| Public Member Functions inherited from UDataBase | |
| bool | isA (const char *typeString) |
| virtual bool | isAlsoA (const char *typeString) |
| virtual void | snprint (const char *preString, char *buff, const int buffCnt) |
| UDataBase () | |
| virtual | ~UDataBase () |
Protected Member Functions | |
| bool | expandAddManALA (UManPPSeq *ppSeq, bool last, double maxAcc, double maxTurnAcc, double *okVel) |
| bool | expandAddManLALA (UManPPSeq *ppSeq, bool last, double maxAcc, double maxTurnAcc, double minTurnRad) |
| void | release (UManoeuvre *toRelease) |
| UManoeuvre * | requestObj (int manType) |
Protected Attributes | |
| UManPPSeq * | p2p [MAX_PP_MAN_CNT] |
| int | p2pCnt |
Static Protected Attributes | |
| static const int | MAX_PP_MAN_CNT = 100 |
Private Attributes | |
| UManoeuvre * | reuse [MAX_REUSABLE_LINE_OBJ] |
| int | reuseCnt |
Static Private Attributes | |
| static const int | MAX_REUSABLE_LINE_OBJ = 100 |
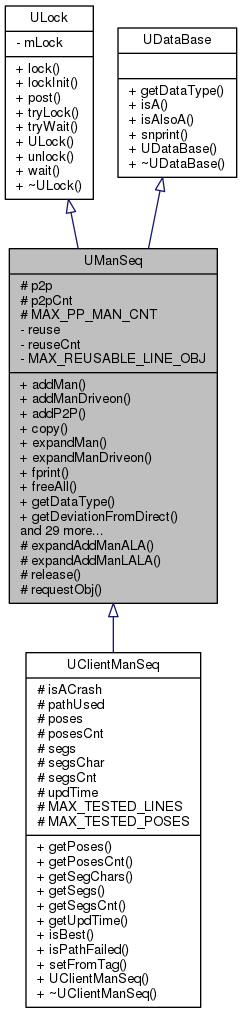
A sequence of manoeuvres and related functions
| UManSeq::UManSeq | ( | ) |
Constructor
References MAX_PP_MAN_CNT, MAX_REUSABLE_LINE_OBJ, p2p, p2pCnt, reuse, and reuseCnt.
| UManSeq::~UManSeq | ( | ) |
Destructor
References freeAll(), and releaseAllMan().
| bool UManSeq::addMan | ( | UPoseV | fromPose, |
| UPoseV | toPose, | ||
| double | maxAcc, | ||
| double | maxTurnAcc, | ||
| double | minTurnRad, | ||
| double * | okVel = NULL |
||
| ) |
Adds a manoeuvre at the end of the current sequence. The from pose should be the same as the toPose of the last manPPSeq. The needed commands to get there are calculated and added. Returns false if a manoeuvre solution is not found. (okVel is no longer supported)
References expandMan(), MAX_PP_MAN_CNT, p2p, and p2pCnt.
Referenced by UAvoidPath2::extendManoeuvre(), getP2PCnt(), testManSeq(), and testManSeqDeviation().
add manoeuvre using an estimate of the drive or driveon command, using the angle and cross distance gains as giudeline for turn radius.
| fromPose | is current pose. |
| toPose | is desired destination pose (line) |
| turnRad | is the turn radius to use. |
References expandManDriveon(), MAX_PP_MAN_CNT, p2p, and p2pCnt.
Referenced by UAvoidPath2::extendManoeuvre(), getP2PCnt(), and UFunctionAvoid::handlePoseToPose().
| UManPPSeq * UManSeq::addP2P | ( | ) |
Add a new (empty) UManPPSeq as a next pose-to-pose sequence. Intended if already calculated manoeuvres are transfreerd to this structure.
References MAX_PP_MAN_CNT, p2p, and p2pCnt.
Referenced by USmlTag::getManSeq(), and getNeededDist().
| bool UManSeq::copy | ( | UManSeq * | source | ) |
Copy the source manouevre sequence to this. Returns true.
References UManPPSeq::add(), UManoeuvre::getAcc(), UManoeuvre::getDistance(), UManPPSeq::getEndPoseV(), UManPPSeq::getEndVel(), UManPPSeq::getMan(), UManPPSeq::getManDist(), UManPPSeq::getManTime(), UManoeuvre::getManType(), getNewArc(), getNewLine(), getNewStop(), getP2P(), getP2PCnt(), UManPPSeq::getSeqCnt(), UManPPSeq::getStartPoseV(), UManoeuvre::getVel(), UManoeuvre::MAN_ARC, UManoeuvre::MAN_LINE, UManoeuvre::MAN_STOP, p2p, p2pCnt, releaseAllMan(), UManPPSeq::setEndPoseV(), UManPPSeq::setEndVel(), UManPPSeq::setManDist(), UManPPSeq::setManTime(), and UManPPSeq::setStartPoseV().
Referenced by getNeededDist(), UResSmrCtl::implementDrivePath(), UResAvoid::methodCallV(), and UResSmrCtl::sendNewManoeuvreToSMR().
|
protected |
Expand a pose to pose manoeuvre to a sequence of simple manoeuvres in 'ppSeq', that can be translated into drive commands. Returns true if successful. The 'maxAcc' is the normal lateral acceleration. The end speed is assumed to be a maximum, that will be reduced if the turn radius and maxTurnAcc requires lower speed. The 'maxTurnAcc' is the centrepetal acceleration allowed. This function calls itself recursively if needed. Expand a pose to pose manoeuvre to a sequence of simple manoeuvres in 'ppSeq', that can be translated into drive commands. Returns true if successful. The 'maxAcc' is the normal lateral acceleration. The end speed is assumed to be a maximum, that will be reduced if the turn radius and maxTurnAcc requires lower speed. The 'maxTurnAcc' is the centrepetal acceleration allowed. This function calls itself recursively if needed.
References UManPPSeq::add(), dist, UPose2pose::get2hereALA(), UManPPSeq::getEndPoseV(), UPose::getMapToPosePose(), UManPPSeq::getMaxManCnt(), getNeededDist(), getNewArc(), getNewLine(), getNewStop(), UManPPSeq::getSeqCnt(), UManPPSeq::getStartPoseV(), UPoseV::getVel(), UPose::h, limitToPi(), maxd(), mind(), UManPPSeq::setEndPoseV(), UManPPSeq::setStartPoseV(), UPoseV::setVel(), signofd(), UPose::x, and UPose::y.
Referenced by getNeededDist().
|
protected |
Expand a pose to pose manoeuvre to a sequence of simple manoeuvres in 'ppSeq', that can be translated into drive commands. Returns true if successful. The 'maxAcc' is the normal lateral acceleration. The end speed is assumed to be a maximum, that will be reduced if the turn radius and maxTurnAcc requires lower speed. The 'maxTurnAcc' is the centrepetal acceleration allowed. This function calls itself recursively if needed.
References UManPPSeq::add(), dist, UPose2pose::get2hereLALA(), UManPPSeq::getEndPoseV(), UPose::getMapToPosePose(), UManPPSeq::getMaxManCnt(), getNewArc(), getNewLine(), UManPPSeq::getSeqCnt(), UManPPSeq::getStartPoseV(), UPoseV::getVel(), UPose::h, UPoseV::setVel(), UPose::x, and UPose::y.
Referenced by expandMan(), and getNeededDist().
| bool UManSeq::expandMan | ( | UPoseV | fromPose, |
| UPoseV | toPose, | ||
| bool | last, | ||
| double | maxAcc, | ||
| double | maxTurnAcc, | ||
| double | minTurnRad, | ||
| UManPPSeq * | ppSeq, | ||
| double * | okVel | ||
| ) |
Expand a pose to pose manoeuvre to a sequence of simple manoeuvres. Returns false if not successful (no path found, i.e. 2cm backwards. REturns initial velocity in 'okVel' if all is OK. Returns a suggestec speed in 'okVel' (> MIN_SPEED = 0.2) if initial velocity is too fast. The 'maxAcc' is the normal lateral acceleration. The end speed is assumed to be a maximum, that will be reduced if the turn radius and maxTurnAcc requires lower speed. The 'maxTurnAcc' is the centrepetal acceleration allowed. This function sets the from-to pose, calls the expandAddMan(...) and set final velocity, distance and time used.
References UManPPSeq::calcEndVel(), expandAddManLALA(), releaseAll(), UManPPSeq::setEndPoseV(), UManPPSeq::setEndVel(), UManPPSeq::setManDist(), UManPPSeq::setManTime(), and UManPPSeq::setStartPoseV().
Referenced by addMan(), getNeededDist(), replaceMan(), and UResSmrCtl::sendNewManoeuvreToSMR().
| bool UManSeq::expandManDriveon | ( | UPoseV | fromPose, |
| UPoseV | toPose, | ||
| double | turnRad, | ||
| UManPPSeq * | ppSeq | ||
| ) |
Expand to an estimated begaviour for a driveon command, separating the behaviour into a turn an optional straight part andother turn and potentially a straight path to the end pose.
| fromPose | is the current pose and velocity. |
| toPose | is the desired target pose (line) and velocity, used in the driveon command |
| turnRad | is the turn radius to use this givess with gA of 2.0 and gD 0.75 a turnradius og ~4m. |
| ppSeq | is the manoeuvre sequence, where the manoeuvres are to be added. |
References UManPPSeq::add(), UManPPSeq::calcEndPose(), UManPPSeq::calcEndVel(), UManPPSeq::fprint(), UPose2pose::get2line(), UPose::getDistance(), UPose::getMapToPosePose(), getNewArc(), getNewLine(), UManPPSeq::getStartPoseV(), UPoseV::print(), releaseAll(), UManPPSeq::setEndPoseV(), UManPPSeq::setEndVel(), UManPPSeq::setManDist(), UManPPSeq::setManTime(), UManPPSeq::setStartPoseV(), UPoseV::vel, UPose::x, and UPose::y.
Referenced by addManDriveon(), getNeededDist(), and replaceManDriveon().
| void UManSeq::fprint | ( | FILE * | fd, |
| const char * | prestr | ||
| ) |
Print status for manoeuvre sequence
References UManPPSeq::fprint(), p2p, p2pCnt, reusableCnt(), and reuseCnt.
Referenced by getNeededDist(), and testManSeq().
| void UManSeq::freeAll | ( | ) |
Free all manoeuvre elements (delete)
References p2p, p2pCnt, reuse, and reuseCnt.
Referenced by getDataType(), and ~UManSeq().
|
inlinevirtual |
Get (end) type of this structure
Reimplemented from UDataBase.
References freeAll(), releaseAll(), releaseAllMan(), releaseLast(), and truncate().
| double UManSeq::getDeviationFromDirect | ( | ) |
Get deviation from the direct line to target
References ULine::getDistanceSq(), UManPPSeq::getEndPos(), p2p, p2pCnt, and ULineSegment::setFromPoints().
Referenced by getNeededDist().
| double UManSeq::getDistance | ( | ) |
Get total route distance
References dist, UManPPSeq::getManDist(), p2p, and p2pCnt.
Referenced by UAvoidPath2::findObstAvoidRoute(), getNeededDist(), and UResSmrCtl::sendNewManoeuvreToSMR().
| double UManSeq::getDistanceFromEndPoseLine | ( | double * | maxHeading | ) |
Calculate the distance from the end-pose line to the point on the manoeuvre furthest away from the line. Only the start/end points of each manoeuvere is used, so if one of the pose to pose manoeuvres has an almost full circle, then the circle is not counted.
| maxHeading | is - if not NULL - set to the most different heading, relative to the end pose. a positive angle is to the left relative to the end pose heading. |
References dist, U2Dlined::distanceSigned(), getEndPoseV(), UManPPSeq::getStartPoseV(), UPose::h, limitToPi(), p2p, p2pCnt, U2Dlined::setPH(), UPose::x, and UPose::y.
Referenced by getNeededDist(), UResSmrCtl::sendNewManoeuvreToSMR(), and testManSeqDeviation().
| double UManSeq::getDistanceXYSigned | ( | UPosition | pos, |
| int * | where, | ||
| bool | posIsRight, | ||
| double | maxDist, | ||
| UPose * | pHit, | ||
| int * | idx, | ||
| double * | t | ||
| ) |
Get distance to this position from the manoeuvre lines. Positive is to the right of segment - seen from first end in direction towards other end (if 'posIsRight' is true). Returnes distance to either end or to a point on line whatever is closest. If 'where' is not NULL, then the closest part is returned here as: 0=point on line, 1= first point, 2= other end, 3 = too far away ( > maxDist). If 'where' is here (== 0), then 'pHit' is set to the closest position to the path. 'idx' is set to the manouvre sequence with the hit, else -1 if closest point is beyond last point. 't' is the distance into that sequence. If where != 0, then pHit will be unchanged
References UManPPSeq::getDistanceXYSigned(), UManPPSeq::getEndPoseV(), UManPPSeq::getManDist(), UManPPSeq::getStartPoseV(), p2p, p2pCnt, UPosition::x, UPose::x, UPosition::y, and UPose::y.
Referenced by getNeededDist(), and testManSeq().
| UPoseV UManSeq::getEndPoseV | ( | ) |
Get the end pose as notet in manoeuver sequence.
References UPose::clear(), UManPPSeq::getEndPoseV(), p2p, p2pCnt, and UPoseV::setVel().
Referenced by UAvoidPath2::convertToManSeq(), getDistanceFromEndPoseLine(), getNeededDist(), getPoseV(), UResSmrCtl::sendNewManoeuvreToSMR(), testManSeq(), and testManSeqDeviation().
| double UManSeq::getMaxTurnArc | ( | ) |
Get the maximum turn angle in this sequence of manoeuvres. Returns 0.0 if no arcs is found.
References a, UManPPSeq::getMaxTurnArc(), p2p, and p2pCnt.
Referenced by getNeededDist(), UResAvoid::methodCall(), and UResAvoid::methodCallV().
| double UManSeq::getMinDistanceXYSigned | ( | ULineSegment * | seg, |
| int * | whereOnSeg, | ||
| UPosition * | posOnSeg, | ||
| bool | posIsRight, | ||
| double | maxDist, | ||
| int * | whereOnMan, | ||
| UPose * | poseOnMan, | ||
| int * | idx | ||
| ) |
Get minimum distance to this line segment from the manoeuvre lines. Positive is to the right of segment - seen from first end in direction towards other end (if 'posIsRight' is true). Returnes distance to either end or to a point on line whatever is closest. If 'whereOnMan' is not NULL, then the closest part is returned here as: 0=point on line, 1= first point, 2= other end, 3 = too far away ( > maxDist). If 'whereOnSeg' is not NULL, then the closest part of segment is returned here as: 0=point on line, 1= first point, 2= other end. if 'poseOnMan' is not NULL then the closest pose is returned. if 'posOnSeg' is not NULL then closest position on segment 'seg' is returned. 'idx' is set to the manouvre sequence with the hit, else -1 if closest point is beyond last point.
References UManPPSeq::getEndPoseV(), UManPPSeq::getManDist(), UManPPSeq::getMinDistanceXYSigned(), UManPPSeq::getStartPoseV(), ULineSegment::length, p2p, p2pCnt, ULine::pos, UPosition::x, UPose::x, UPosition::y, and UPose::y.
Referenced by getNeededDist().
|
inline |
Calculate needed acceleration to get from speed to an end speed using only this distance. uses the formular V� - V_0� = 2 a s
References sqr().
|
inline |
Calculate needed distance to accelerate from speed to an end speed using this accelertion. uses the formular V� - V_0� = 2 a s
References addP2P(), copy(), expandAddManALA(), expandAddManLALA(), expandMan(), expandManDriveon(), fprint(), getDeviationFromDirect(), getDistance(), getDistanceFromEndPoseLine(), getDistanceXYSigned(), getEndPoseV(), getMaxTurnArc(), getMinDistanceXYSigned(), getPoseV(), getStartPoseV(), getTime(), isValid(), print(), release(), removeLastArc(), requestObj(), reusableCnt(), and sqr().
Referenced by expandAddManALA().
| UManoeuvre * UManSeq::getNewArc | ( | double | radius, |
| double | angle, | ||
| bool | left, | ||
| double | acceleration, | ||
| double | targetVel | ||
| ) |
Make a new manoeuvre from these data. An arc with this acceleration. Radius is turn radius in meter, sign is always positive. Angle is turn angle in radians, positive is left (counter-clockwise). Angle may be more than PI. Acceleration is signed, positive is increased speed forward. Returns a pointer to the created object.
References UManoeuvre::MAN_ARC, requestObj(), UManoeuvre::setAcc(), UManArc::setTurnAngle(), UManArc::setTurnRadius(), and UManoeuvre::setVel().
Referenced by copy(), expandAddManALA(), expandAddManLALA(), expandManDriveon(), USmlTag::getManSeq(), getNewArc(), and getP2PCnt().
|
inline |
Get a new arc amnoeuvre, where left or right is determined by angle sign. Else same as other function by same name.
References getNewArc(), and getNewStop().
| UManoeuvre * UManSeq::getNewLine | ( | double | dist, |
| double | acceleration, | ||
| double | targetVel | ||
| ) |
Make a new manoeuvre from these data. A straight line with this acceleration. Distance is traveled distance in current direction. Acceleration is signed, positive is increased speed forward. Returns a pointer to the created object.
References UManoeuvre::MAN_LINE, requestObj(), UManoeuvre::setAcc(), UManLine::setDistance(), and UManoeuvre::setVel().
Referenced by copy(), expandAddManALA(), expandAddManLALA(), expandManDriveon(), USmlTag::getManSeq(), and getP2PCnt().
| UManoeuvre * UManSeq::getNewStop | ( | ) |
Make a new stop manoeuvre. should set wheel speed to 0,0 at this point - may be an emergency stop, or just target reached. Returns a pointer to the created object.
References UManoeuvre::MAN_STOP, requestObj(), UManoeuvre::setAcc(), and UManoeuvre::setVel().
Referenced by copy(), expandAddManALA(), USmlTag::getManSeq(), and getNewArc().
| UManPPSeq * UManSeq::getP2P | ( | int | idx | ) |
Get manoeuvre with this index
Referenced by copy(), UAvoidPath2::extendManoeuvre(), getP2PCnt(), UFunctionRoadDrive::handleCommand(), UFunctionDrivePos::handleDrivePos(), UPaintManoeuvre::makeManCloud(), UNavPaint::paintManData(), UClientFuncLaserGui::paintPathData(), UResSmrCtl::run(), UFunctionAvoid::sendCurrentAvoidPath(), UFunctionAvoid::sendCurrentPath(), UFunctionAvoid::sendManSeq(), and UResSmrCtl::sendNewManoeuvreToSMR().
|
inline |
Get manoeuvre count
References addMan(), addManDriveon(), dist, getNewArc(), getNewLine(), getP2P(), p2pCnt, replaceMan(), and replaceManDriveon().
Referenced by UAvoidPath2::convertToManSeq(), copy(), UAvoidPath2::extendManoeuvre(), UFunctionRoadDrive::handleCommand(), UFunctionDrivePos::handleDrivePos(), UPaintManoeuvre::makeManCloud(), UNavPaint::paintManData(), UClientFuncLaserGui::paintPathData(), UResSmrCtl::run(), UFunctionAvoid::sendCurrentAvoidPath(), UFunctionAvoid::sendCurrentPath(), UFunctionAvoid::sendManSeq(), and UResSmrCtl::sendNewManoeuvreToSMR().
| UPoseV UManSeq::getPoseV | ( | double | atManTime | ) |
Get pose at this time. Time is in seconds into the manoeuvre from its start pose.
References getEndPoseV(), UManPPSeq::getManTime(), p2p, and p2pCnt.
Referenced by getNeededDist().
| UPoseV UManSeq::getStartPoseV | ( | ) |
Get the start pose as stored in this manoeuvre sequence.
References UManPPSeq::getStartPoseV(), p2p, and p2pCnt.
Referenced by getNeededDist(), UClientFuncLaser::handlePath(), UPaintManoeuvre::makeManCloud(), and UResSmrCtl::sendNewManoeuvreToSMR().
| double UManSeq::getTime | ( | ) |
Get time to complete manoeuvre to end
References UManPPSeq::getManTime(), p2p, and p2pCnt.
Referenced by UAvoidPath2::getManTime(), and getNeededDist().
| bool UManSeq::isValid | ( | ) |
Is manoeuvre sequence valid, i.e. atr there any movement defined
References UManPPSeq::isValid(), p2p, and p2pCnt.
Referenced by getNeededDist().
| const char * UManSeq::print | ( | const char * | prestr, |
| char * | buff, | ||
| const int | buffCnt | ||
| ) |
Print manoeuvre status to string
References p2p, p2pCnt, UManPPSeq::print(), reusableCnt(), and reuseCnt.
Referenced by getNeededDist(), UResAvoid::methodCall(), UResAvoid::methodCallV(), UResSmrCtl::sendNewManoeuvreToSMR(), testManSeq(), and testManSeqDeviation().
|
protected |
Release a manoeuvre object for reuse
References MAX_REUSABLE_LINE_OBJ, reuse, and reuseCnt.
Referenced by getNeededDist(), releaseAll(), removeLastArc(), and truncate().
| void UManSeq::releaseAll | ( | UManPPSeq * | ppseq | ) |
Release all manoeuvres to the reuse stack from thei pose-to-pose sequence
References UManPPSeq::extract(), UManPPSeq::getSeqCnt(), release(), UManPPSeq::setFirstFixed(), and UManPPSeq::setLastFixed().
Referenced by expandMan(), expandManDriveon(), getDataType(), releaseAllMan(), and releaseLast().
| void UManSeq::releaseAllMan | ( | ) |
Release all manoeuvres from all pose-to-pose sequences. Returns true if is moved to reuse stack. If not space in reuse stack, then deleted altogether.
References p2p, p2pCnt, and releaseAll().
Referenced by UAvoidPath2::clear(), copy(), UAvoidPath2::findObstAvoidRoute(), getDataType(), UClientManSeq::setFromTag(), testManSeq(), testManSeqDeviation(), and ~UManSeq().
| void UManSeq::releaseLast | ( | ) |
Release last of the pose to pose manoeuvres, reducing the count of pp manoeuvres by 1.
References p2p, p2pCnt, and releaseAll().
Referenced by UAvoidPath2::convertToManSeq(), and getDataType().
| void UManSeq::removeLastArc | ( | ) |
REmove last arc (probably unusable due to too small turn radius)
References UManPPSeq::getMan(), UManoeuvre::getManType(), UManPPSeq::getSeqCnt(), UManoeuvre::MAN_ARC, p2p, p2pCnt, release(), and UManPPSeq::truncate().
Referenced by getNeededDist().
| bool UManSeq::replaceMan | ( | UPoseV | midPose, |
| bool | fixate, | ||
| double | maxAcc, | ||
| double | maxTurnAcc, | ||
| double | minTurnRad, | ||
| int | fromIdx, | ||
| int | toIdx, | ||
| bool | newEndpoint, | ||
| double * | okVel | ||
| ) |
Replace the manoeuvre set including fromIdx and toIdx (and any inbetween) with two manoeuvre sets using this intermediate pose If 'fixate' is true, then the new mid-pose is to be fixated, i.e. not to be replaced if route is near an obstacle close by, typically when passing a narrow gate. If 'newEndpoint' == true, then only one new sequence is generated. Returns true if all is OK. (okVEl not supported: Returns a suggested initian velocity in 'okVel' (>MIN_SPEED=0.2) if manoeuvres start with a emergency break), Returns 0.0 if no solution is found.
References expandMan(), UManPPSeq::getEndPoseV(), UManPPSeq::getEndVel(), UManPPSeq::getStartPoseV(), MAX_PP_MAN_CNT, maxi(), mini(), p2p, p2pCnt, UManPPSeq::setLastFixed(), and UPoseV::setVel().
Referenced by getP2PCnt().
| bool UManSeq::replaceManDriveon | ( | UPoseV | midPose, |
| bool | fixate, | ||
| double | turnRad, | ||
| int | fromIdx, | ||
| int | toIdx, | ||
| bool | newEndpoint | ||
| ) |
Replace some manoeuvres with a new new manoeuvres, that passes a new mid-point.
| midPose | is the new midPose. |
| fixate | if true, the poses will not be moved?? |
| turnRad | is the turn radius to use |
| fromIdx | is the first manoeuvre index to be replaced. |
| toIdx | is the last index to be replaced. |
| newEndPoint | if true, then the new manoeuvre should end at the midPose, replacing the old manoeuvres. |
References UManPPSeq::calcEndPose(), expandManDriveon(), UManPPSeq::getEndPoseV(), UManPPSeq::getEndVel(), UManPPSeq::getStartPoseV(), MAX_PP_MAN_CNT, maxi(), mini(), p2p, p2pCnt, UManPPSeq::setEndPoseV(), UManPPSeq::setLastFixed(), and UPoseV::setVel().
Referenced by getP2PCnt().
|
protected |
Request object, either from reuse stack, or freshly made from data heap.
References UManoeuvre::MAN_ARC, UManoeuvre::MAN_LINE, UManoeuvre::MAN_STOP, MAX_REUSABLE_LINE_OBJ, reuse, and reuseCnt.
Referenced by getNeededDist(), getNewArc(), getNewLine(), and getNewStop().
| int UManSeq::reusableCnt | ( | ) |
Get available objects in reuse stack. That is count of non-null pointers up to reuseCnt.
References reuse, and reuseCnt.
Referenced by fprint(), getNeededDist(), and print().
| void UManSeq::truncate | ( | UManPPSeq * | ppseq, |
| int | newCnt | ||
| ) |
Truncate this pose-to-pose sequence to this number of manoeuvre primitives
| ppseq | is the pose to pose sequence belonging to this sequence. |
| newCnt | is the new valid count of manoeuvres - must be >= 0. |
References UManPPSeq::extract(), UManPPSeq::getSeqCnt(), and release().
Referenced by UAvoidPath2::convertToManSeq(), and getDataType().
|
staticprotected |
Referenced by addMan(), addManDriveon(), addP2P(), replaceMan(), replaceManDriveon(), and UManSeq().
|
staticprivate |
Referenced by release(), requestObj(), and UManSeq().
|
protected |
Manoeuver sequence based on UManoeuvre
Referenced by addMan(), addManDriveon(), addP2P(), copy(), fprint(), freeAll(), getDeviationFromDirect(), getDistance(), getDistanceFromEndPoseLine(), getDistanceXYSigned(), getEndPoseV(), getMaxTurnArc(), getMinDistanceXYSigned(), getP2P(), getPoseV(), getStartPoseV(), getTime(), isValid(), print(), releaseAllMan(), releaseLast(), removeLastArc(), replaceMan(), replaceManDriveon(), and UManSeq().
|
protected |
Number of manoeuvres in sequence
Referenced by addMan(), addManDriveon(), addP2P(), copy(), fprint(), freeAll(), getDeviationFromDirect(), getDistance(), getDistanceFromEndPoseLine(), getDistanceXYSigned(), getEndPoseV(), getMaxTurnArc(), getMinDistanceXYSigned(), getP2P(), getP2PCnt(), getPoseV(), getStartPoseV(), getTime(), isValid(), print(), releaseAllMan(), releaseLast(), removeLastArc(), replaceMan(), replaceManDriveon(), and UManSeq().
|
private |
When an object is released, it is added to this list. When new objects are needed this list is searced first. Array of manoeuvres for reuse
Referenced by freeAll(), release(), requestObj(), reusableCnt(), and UManSeq().
|
private |
Number of released pointers
Referenced by fprint(), freeAll(), print(), release(), requestObj(), reusableCnt(), and UManSeq().
 1.8.11
1.8.11

