|
AURobotServers
4
|
Public Member Functions | |
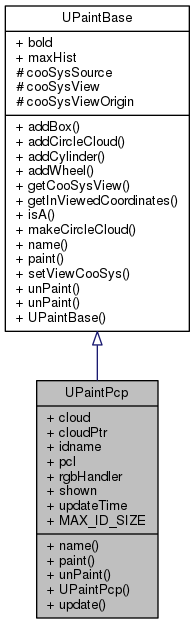
| virtual const char * | name () |
| virtual void | paint (pcl::visualization::PCLVisualizer *viewer) |
| virtual void | unPaint (pcl::visualization::PCLVisualizer *viewer) |
| UPaintPcp () | |
| constructor More... | |
| virtual void | update (UPcpItem *newPcl, UResPoseHist *posesys, UPose *rp) |
| update with this point cloud More... | |
 Public Member Functions inherited from UPaintBase Public Member Functions inherited from UPaintBase | |
| void | addBox (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x, double y, double z, const char *id, const double color[3]) |
| void | addCircleCloud (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::PointCloud< pcl::PointXYZ >::Ptr *cloud, double x, double y, double h, double radius, const char *ID) |
| void | addCylinder (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x1, double y1, double z1, double x2, double y2, double z2, double radius, const char *id, const double color[3]) |
| void | addWheel (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer, pcl::ModelCoefficients *params, double x, double y, double h, double radius, double width, const char *id) |
| const int | getCooSysView () |
| pcl::PointXYZ | getInViewedCoordinates (UPose *local, int cooSysLocal, double z) |
| bool | isA (const char *testName) |
| void | makeCircleCloud (pcl::PointCloud< pcl::PointXYZ > *cloud, UMatrix4 *pose, double radius) |
| virtual void | paint (UPose *currentPose, pcl::visualization::PCLVisualizer *viewer) |
| virtual void | setViewCooSys (int refSystem, UPose origin) |
| virtual void | unPaint (pcl::visualization::PCLVisualizer *viewer, int viewMaxHist) |
| UPaintBase () | |
Public Attributes | |
| pcl::PointCloud< pcl::PointXYZRGB > * | cloud |
| point cloud for the scan More... | |
| pcl::PointCloud< pcl::PointXYZRGB >::Ptr * | cloudPtr |
| boost pointer to the cloud More... | |
| char | idname [MAX_ID_SIZE] |
| UPcpItem * | pcl |
| pointer to pcl More... | |
| pcl::visualization::PointCloudColorHandlerRGBField< pcl::PointXYZRGB > * | rgbHandler |
| rgbhandler More... | |
| bool | shown |
| shown already More... | |
| UTime | updateTime |
| last update time More... | |
| Public Attributes inherited from UPaintBase | |
| bool | bold |
| int | maxHist |
Static Public Attributes | |
| static const int | MAX_ID_SIZE = 32 |
| last known name (display ID) More... | |
Additional Inherited Members | |
| Protected Attributes inherited from UPaintBase | |
| int | cooSysSource |
| int | cooSysView |
| UPose | cooSysViewOrigin |
|
inline |
constructor
References UTime::clear().
|
inlinevirtual |
get cloud name
Reimplemented from UPaintBase.
References idname.
Referenced by UPaintPolygon::addPolyToViewer().
|
inlinevirtual |
Paint robot at this post to this viewer.
References UPaintBase::bold, cloudPtr, UPcpItem::getCloudType(), idname, UPcpItem::PointXyzRgb, and rgbHandler.
|
inlinevirtual |
remove all items from this viewer.
Reimplemented from UPaintBase.
Referenced by UPaintLaserScan::addScanToViewer(), UPaintPolygons::unPaintAll(), and UPaintLaserScans::unPaintAll().
|
inlinevirtual |
update with this point cloud
References UPose::asMatrix4x4PtoM(), UPose::asMatrix4x4PtoMPos(), UPcpItem::cooSys, UMatrix::getData(), UPosRot::getRtoMMatrix(), UPcpItem::name, UPcpItem::relPose, UPcpItem::relPoseUse, UPcpItem::updateTime, and UPcpItem::xyzrgb.
| pcl::PointCloud<pcl::PointXYZRGB>* UPaintPcp::cloud |
point cloud for the scan
Referenced by UPaintBase::addCircleCloud(), UPaintLaserScan::~UPaintLaserScan(), and UPaintPolygon::~UPaintPolygon().
| pcl::PointCloud<pcl::PointXYZRGB>::Ptr* UPaintPcp::cloudPtr |
boost pointer to the cloud
Referenced by UPaintManoeuvre::addManToViewer(), UPaintPolygon::addPolyToViewer(), UPaintLaserScan::addScanToViewer(), paint(), UPaintPoseHist::paint(), and UPaintLaserScan::~UPaintLaserScan().
| char UPaintPcp::idname[MAX_ID_SIZE] |
|
static |
last known name (display ID)
| UPcpItem* UPaintPcp::pcl |
pointer to pcl
Referenced by UNavView::paintPointClouds().
| pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB>* UPaintPcp::rgbHandler |
rgbhandler
Referenced by UPaintLaserScan::addScanToViewer(), paint(), and UPaintLaserScan::~UPaintLaserScan().
| bool UPaintPcp::shown |
shown already
| UTime UPaintPcp::updateTime |
last update time
 1.8.11
1.8.11

